
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Электронные усилители и рез получается резонанс в ветвях и /,др - С соединенных параллельно. При этом полное выходное сопротивление выпрямителя может быть заметно больше R. Когда частота (й достаточно велика, выходное сопротивление можно считать равным сопротивлению конденсатора С,: -licA (1-22) На рис. 11.7 изображены основные характеристики выпрямителя, построенного по схеме рис. 11.6. Характеристики рассчитаны по графикам рис. 11.4 и формулам (11.1), (И.З), (11.20) и (11.21) при следующих данных: С, = 20 мкф, Cj = 40 мкф, 1 - 14,2 гн, /?др = 250 ом, /?я = 525 ом (при токе 4 = 200 ма), £ = 548 в. О выпрямителе с индуктивной нагрузкой вентилей. Если в схемах рис. 11.6 убрать конденсатор С то нагрузка вентилей будет иметь индуктивный характер. Достоинство таких выпрямителей состоит в их малом выходном сопротивлении ?в==? + др. (И-23) которое постоянно при достаточно больших токах нагрузки 4>0,033ffi-. (11.24) Выходное напряжение выпрямителя при соблюдении указанного условия равно н = 4-£ н-/н(?, + ?др)- (И.25) Недостатками выпрямителя являются: меньшее выходное напряжение, чем в схеме с конденсатором С а также большие пульсации. Более*подробно выпрямитель описан в книге I11.1J. Полное выходное сопротивление выпрямителя с фильтром зависит от частоты СОц тока нагрузки. Для схемы рис. 11.6, а оно таково; Выходное сопротивление для постоянной составляющей тока нагрузки ((1) = 0) равно ?в = ?др + ?в . (11-21) На частоте JL .1. J А л U 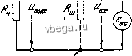 aJ б) Рис. И. 8. Структурные схемы стабилизаторов: а) последовательного типа, б) параллельного типа. достаточно велико, если стабилизируется ток в нагрузке. Выпрямители в большинстве случаев непригодны для питания электронных схем, так как эдс выпрямителя изменяется пропорционально изменениям сетевого напряжения, а выходное сопротивление выпрямителя слишком велико для питания цепей, требующих стабильного напряжения, и недостаточно велико для питания цепей, требующих стабильного тока при изменении сопротивлений цепей. Стабилизаторы напряжения и тока в значительной степени свободны от этих недостатков. Для получения эффективной стабилизации напряжения или тока между нагрузкой и выпрямителем необходимо включить нелинейный элемент, параметр которого-сопротивление R-зависит от напряжения и тока. В стабилизаторах последовательного типа нелинейное сопротивление R включают последовательно между нагрузкой и выпрямителем- рис. 11.8, а. В этом случае необходимо, чтобы выполнялось требование /?/?g-fЕсли бы выходные сопротивления выпрямителей R были велики, то в такой схеме пришлось бы ставить шунтирующее сопротивление R для уменьшения выходного сопротивления выпрямителя. К счастью, сопротивления R обычно достаточно малы, и такие случаи встречаются редко. В стабилизаторах параллельного типа сопротивление R включают параллельно нагрузке и выпрямителю-рис. 11.8, б. В этом случае необходимо выполнение требования /?</?, где двойной индекс § 11.3. Параметрические стабилизаторы напряжения и тока Большинство усилителей, предназначенных для точных измерений, требует стабильного напряжения питания анодных или коллекторных цепей, а в некоторых случаях требуется стабильность тока накала ламп. Стабильность питания обеспечивается соблюдением двух условий: а) эдс источника питания должна быть стабильной, б) выходное сопротивление источника питания должно быть достаточно мало, если стабилизируется напряжение на нагрузке, или соответствует параллельному соединению соответствующих сопротивлений. Поскольку выходные сопротивления выпрямителей невелики, для соблюдения этого условия приходится включать последовательно с выпрямителем балластное сопротивление R, обеспечивая таким способом соотношение п Rb + R6 . + R6 Характеристики нелинейных сопротивлений, используемых в стабилизаторах, изображены на рис. 11.9. На рабочем участке АБ характеристики нелинейного 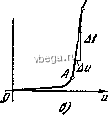 Рис. П.9. Характеристики нелинейных элементов: а) типа бареттера, б) типа стабилитрона. элемента типа бареттера, рис. 11.9,а, дифференциальное сопротивление /?=Д /Дг должно быть велико. Нелинейный элемент типа стабилитрона имеет характеристику с малым сопротивлением R в пределах рабочего участка - рис. 11.9,6. В соответствиис величиной дифференциального сопротивления бареттеры применяются в схеме последовательного типа для стабилизации тока, а стабилитроны используются в параллельной схеме для стабилизации напряжения - рис. 11.10. Крайние режимы работы бареттера в схеме стабилизатора тока характеризуются следующими неравенствами :бм , (11.26а) з, (11.266) :+вых мин)- рис. 11.10, б проиллюстрированы эти неравенства, выражающие условия нахождения рабочей точки в пределах рабочего участка АБ характеристики бареттера. Исходными данными при расчете стабилизатора тока являются величина стабильного тока в нагрузке и ее сопротивление-макси- а также относительное изме- вх мни вых (в + макс) i вх макс вых (в + н мин) ГЛе вых = 0.5 (в мальное R, и минимальное нение напряжения сети, равное 6 = *сетн номин сети мин вх макс вх мин вх номин Требуется выбрать бареттер и определить эдс выпрямителя вд- Задавшись ориентировочно выходным сопротивлением выпрямителя R, из равенства (11.26а) определяют е, а затем прове-
|