
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Термоэлектрические преобразователи Таблица 14
Д-32П2 Таблица 15
двигателя начинает вращаться. Конденсатор, подключенный параллельно управляющей обмотке, служит для фильтрации высших гармоник тока этой обмотки. Ротор электродвигателя имеет короткоэамкнутую обмотку типа беличье колесо . С помощью встроенного редуктора обеспечивается различная частота вращения входного вала. Для работы с полупроводниковыми усилителями применяют электродвигатели типа РД-09П, РД-09П2, Д32П, а для работы с ламповыми усилителями - электродвигатели РД-09 и Д-32. Основные требования, предъявляемые к асинхронным электродвигателям: отсутствие вращающего момента при снятии напряжения с обмотки управления и напряжения трогания. Механические характеристики асинхронных электродвигателей приведены в табл. 14, а электрические характеристики - в табл. 15. 6. СИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ Синхронные электродвигатели применяют для привода диаграммной ленты и диаграммных дисков, а также для приведения в действие печа- Табпица 16
1/478 1/670 3.14 2,24 1,50 тающего механизма и переключателей многоточечных приборов. Частота вращения ротора синхронного электродвигателя равна частоте вращения магнитного поля. Учитывая зависимость частоты в ращения ротора от колебания промышленной частоты тока, необходимо проверку скорости прохождения диаграммных лент и дисков приборов производить по электрическим часам, показания которых также зависят от частоты электрического тока. В качестве синхронных электродвигателей наибольшее распространение получили: однофазные конденсаторные двигатели типа СД-54; магнитоэлектрические двигатели типа ДСМ-2 и ДСМ-0,2. Механические характеристики электродвигателей СД-54 приведены в табл. 16. Механические характеристики электродвигателей ДСМ-2 и ДСМ-0,2: частота вращения выходного вала соответственно равна 2 и 0,2 мин пусковой момент - 0,15 и 0,25 Н м. 7. ВЫХОДНЫЕ УСТРОЙСТВА АВТОМАТИЧЕСКИХ ПОТЕНЦИОМЕТРОВ И МОСТОВ Выходные устройства автоматических потенциометров и мостов служат для передачи измеряемого сигнала в другие схемы систем контроля и регулирования. К таким устройствам относятся реостатные задат-чики, контактные сигнапизирующие устройства, позиционные регулирующие устройства и преобразователи выходных унифицированных сигналов (последние в данной главе не рассматриваются). Реостатные эадатчики, встраиваемые в приборы, представляют собой переменный проволочный резистор, каркас которого изготовляется из алюминиевой пластины, покрытой изоляционным лаком, или пластмассы. Рабочая обмотка резистора выполнена из манганиновой проволоки или сплава ПдВ. Часть обмотки, по которой движется ползунок задатчика, очищена от изоляции. Ползунок может быть изготовлен в форме шарика, бочонка, лепестка или щеточки. Задатчик настраивают так, чтобы при соответствии температуры заданному значению ползунок находился бы в середине реостата, а при 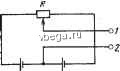 El EZ Рис. 48. Принципиальная схема 10 %-ro задатчика Рис. 49. Принципиальная схема 100 %-го задатчика ее отклонении в ту или иную сторону он пропорционально перемещался бы по реостату. Реостатные задагчики бывают десяти- и стопроцентными. В 10%-ных задатчиках используют перемещение стрелки вторичного прибора в диапазоне + 10 % шкапы. В 100%-ных задатчиках максимальное перемещение ползунка реостата вызывается перемещением стрелки вторичного прибора по всей шкале. Принципиальная схема 10%-го задатчика показана на рис. 48. Она состоит из одного реостата R. Ползунок 10%-го реостатного задатчика связан с пером и указателем задания прибора так, что при соответствии значения регулируемого параметра заданию он располагается точно по середине обмотки задатчика. Отклонение параметра от задания вызывает пропорциональное изменение положения ползунка относительно обмотки в диапазоне ± 10 % шкалы прибора. При подаче сигнала рассогласования, составляющего более ± 10 % диапазона измерения, изменение сопротивления задатчика не происходит; 100%-й реостатный задатчик (рис. 49) состоит из реохорда-датчика R1 (параметр), резистора задатчика R2 (задание), резистора точной настройки R3 и механизма установки задания. Ползунок 100 %-го реостатного зададчика установлен так, что он кинематически связан с центральной осью прибора. Поэтому каждому значению измеряемого параметра соответствует определенное положение контактов ползунка реохорда-задатчика на обмотке. В реохордных приборах реохорд-датчик имеет общий ползунок с реохордом измерительной схемы. Каждому значению измеряемой величины соответствует определенное положение контактов ползунка реохорда-датчика на его обмотке. Параллельно реохорд-датчику включен переменный резистор задатчика, так что вместе они образуют измерительный мост. Механизм установки задания воздействует на ползунок резистора задатчика. При изменении регулируемого параметра или задания сигнал рассогласования, пропорциональный величине изменения, поступает на вход электрического регулятора. При соответствии значения параметра заданию сигнал рассогласования равен нулю. Точное согласование задания параметру осуществляют при помощи дополнительного переменного резистора R3, включенного в диагональ моста. Питание реостатных задатчиков осуществляется от внешнего источника переменного тока напряжением не более 12 В. Сигнализирующие устройства позволяют регистрировать достижение определенного значения из-
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||