
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем лизуемой. Подставив w= (z - l)/(z + 1) в выражение (9-94), после уп-рощений получим c(z-l) +c j(z-l) -i(z+1)+... + Gjz) = - ml ---- d (z-l) -Hd .i(z-l) -i(z+l)+...+ (9-95) ei(-l)( + l) -eo(z + ir dj(z-l)(z + l) -4do(z + l) Это выражение показывает, что если (w) задана в виде (9-94), то независимо от соотношения тип функция (z) всегда будет иметь одинаковое количество полюсов и нулей. Это значит, что Gz) всегда будет физически реализуемой, если только Сс() имеет вид (9-94). Однако, если необходимо, чтобы цифровой регулятор бьш устойчивым, то все полюсы G£.(z) должны лежать внутри единичной окружности z = 1 и соответственно все полюсы G, (w) - в левой половине w-nnoCKoCTH. Кроме того, из выражения (9-95) следует, что если т > п, то G (z) будет иметь т-п полюсов z = - 1, а это есть признак неустойчивости. Следовательно, для получения устойчивого цифрового регулятора необходимо потребовать, чтобы число нулей Gf.{w) бьшо не более числа ее полюсов. На практике допустимо иметь неустойчивый цифровой регулятор, лишь бы система в целом оставалась устойчивой, хотя, по возможности, надо стремиться к тому, чтобы система бьша устойчива и в разомкнутом и в замкнутом состояниях. 4. Если найдена Gc(w), то Gc(z) получают подстановкой w = = (z - l)/(z + 1). Заключительный этап синтеза состоит в реализации Gf, (z) одним из методов, рассмотренных в п. 9.4. Если Gq (z) должна быть реализована с помощью микроЭВМ, то проектировщик обязан учитывать при синтезе все ограничения, свойственные ЭВМ. Проиллюстрируем описанный вьппе метод синтеза на примере. Пример. 9.6. Пустьв цифровой системе, изображенной на рис. 9.30, управляемый процесс описьшается передаточной функцией р() s(1 + 0,1s)(1 + 0,5s) (9-96) Период квантования в системе равен 0,5 с. На практике период квантования является одним из параметров шстемы, который определяется проектировтциком. В данном случае мы предполагаем, что период квантования был выбран ранее по некото-ролу критерию, не имеющему непосредственного отношения к решаемой здесь задаче. Суть проблемы состоит в синтезе цифрового регулятюра с учетом следующих требований к котеству системы: коэффициент ошибки по скорости АГу > 3; запас по фазе >50°; резонансный пик Мр < 1,3. Еще раз сугметим, что эти требования выбираются из чисто качественных соображений для представления проектировщику возможности произвести синтез, опираясь на известные аналитические методы. В завершение процедуры синтеза необходимо проверить, действительно ли в данной системе достаточно иметь запас по фазе 50° и резонансный пик 1>3- z-преобразование передаточной функции разомкнутой системы без коррекции/ (при 7=0,5 с) имеет вид S s(l + 0,ls)(l + 0,5s) ... K(0.13z2 + 0.177z + 0,0077) . 0.13K(z -f 1.31)(z + 0,045) z(z - l)(z - 0,368) ~ z(z-l)(z-0,368) Пусть коэффициент ошибки по скорости ~ 3, тогда в соответствии с (6-75) имеем #:v = 3 = ium [(z - l)Gf,oGpiz)] = 0,99K. (9-98) Таким образом, К=3. Подстановкаz = (1 + w)/(1 - w) и АГ = 3 в (9-97) дает результат , - 0.75(1-w)(l-f0.9w)(l-0.134w) hop* w(l -I- w)(l + 2,17w) (9-99) Ha рис. 9.31 изображены логарифмические частотные характеристики для передаточной функции (9-99). По амплитудной и фазовой характеристикам видно, что при К = 3 система без коррекции находится почти на границе устойчивости. Запасы устойчивости и по модулю, и по фазе приблизительно равны нулю. Можно показать, что критическое значение К равно 3,3. Чтобы обеспечить запас по фазе 50°, сохраняя коэффициент оушбки по скорости равным 3, предлагается использовать регулятор Gf, (w) с отставанием по фазе, так как регулятор с опережением по фазе в данном случае будет неэффективен из-за резкого завала фазовой характеристики после знЭг чения - 180°. Выберем передаточную функцию G(. (w) в виде 1 -I- arw G Jw; = 1 -f TW (а<1) (9-100) На рис. 9.31 видно, что для получения запаса по фазе 50° частоту среза системы необ-, ходимо сдвинуть из точки изц, = 0,6 в точку CJ, = 0,2 при условии, что регулятор Ggiw) не окажет существенного влияния на фазовый сдвиг на новой частоте среза. Логарифмические характеристики показьшают, что усиление GfioGp(w) на частоте ~ 0,2 приблизительно равно 12 дБ. Следовательно, регулятор Це(и) должен на этой частоте вносить ослабление 12 дБ. Из таких соображений определяется значение с в выражении (9-100): 201ёй = -12дБ, (9-101) откуда а = 0,25. Чтобы фазовая характеристика Giw) не оказывала существенного влияния на фазовый сдвиг скорректированной системы в точке ьо = 0,2, выберем частоту, соответствуюшую правому излому амплитудной характеристики Giw), на декаду меньше значешя со = 0,2. Таким образом, 1/ат = 0,02 (9-102) 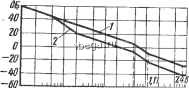 0,005 ОМ -т -по -360 0,001
0.01 . Рис. 9.31. Логарифмические частотные характеристики импульсной системы с цифровым регулятором: 7 - амплитудная характеристика Gfi(,Gp(w) (нескорректированная система); 2 - амплитудная характеррстика Gc(w)GfioGp(w) (система с коррекцией); 3 - фазовая характеристика (без коррекции); 4 - фазовая характеристика (с коррекцией) Рис. 9.32. Диаграмма Никольса дБ : перенесенными на нее харак-еристиками разомкнутой (ксемы: J GhoGpbv) (коррекция от-фтствует); 2 - СМСоХ (система с коррек- > Gp(w) 11ией) , следовательно, 1/т= 0,005 (9-103) О огда передаточная функция Цифрового регулятора в w-об- -да ласти принимает вид Передаточная функция разом-кнутой скорректированной системы имеет вид 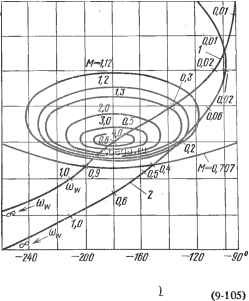 Г (win G (wl - 0.75(1 + 50w)(l - w)(l + 0,9w)(l - 0,134w chOp - w(1 -I- 200w) (1 + w)(1 + 2,17w) Логарифмические частотные характеристики для этой передаточной функции представлены на рис. 9.31. Заметим, что запас по фазе теперь приблизительно равен 50 . Амплитудные и фазовые характеристики для GiGpiw) и Gc{w)GfjQGp{w), перенесенные на диаграмму Никольса, изображены на рис. 9.32. По этим кривым можно получить следующую сравнительную оценку показателей качества скорректированной и нескорректированной систем: Резонансный пик Мр . Резонансная частота <w,-(<-j,-. рад/с) Запас по фазе, градус Запас по модулю, дБ . Полоса пропускания Нескорректированная система Почти °° 0,6(2,1) ~0 ~0 0,9 (3 рад/с) Скорректированная система 1,2 0,2(0,8) 50 12 0,4 (1,5 рад/с) Передаточная функция Gq{z) получается в результате подстановки w = {z ~ - 1)/ (Z + 1) в выражение (9-104) : Gc(-) = 025 (9-106) Чтобы убедиться в правильности решешя задачи синтеза, запишем передаточную функцию замкнутой системы с коррекцией C(z) Gc(z)Gf,oGpiz) 0,0975z3-bO,0385z2-0,121 Iz-0,0055 R{z) 1+ Gc(z)Gf,oGp(z) z4-2,2605z3-Hl,7608z.2-0,4854z-0,0055 (9-107) Эта передаточная функция имеет полкюы z = - 0,0108; 0,9563; 0,6575 + /0,309 и 0,6575 - /0,309. Переходная функция системы изображена на рис. 9.33. Максимальное перерегулирование не превышает 19%, что подтверждает правильность выбора запаса по фазе 50°. Заключительный этап синтеза может включать в себя реализацию G(z) каким-
|
||||||||||||||||||||||||||||||||||||||