
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем A,(l+c,z-l) Gek = Gek = (1 + dz- + fz-) (1 + dz-l + fz-2)J zJ (простые -комплексно-сопряженные полюсы); (/=1,2, Л; комплексные полюсы кратности N); (/= 1,2, ...,N; m~n=N>0). Каждая из перечисленных здесь передаточных функций опять-таки может быть реализована методом непосредственного программирования. Структурная схема параллельного программирования изображена на рис. 9.25. Проиллюстрируем на примере все три рассмотренньгх выше метода программирования. Пример 9-5. Рассмотрим следующую передаточную функцию цифрового регулятора: EgCz) 5(1 + 0.25z-) Ej(z) с (l-0,5z-l)(l-0,lz-l) (9-87) Физическая реализуемость этой передаточной функции очевидна. Реализуем ее методами непосредственного программирования, последовательного программирования и параллельного грограммирования. 1. Непосредственное программирование. Произведя перекрестное умножениев выражении (9-87), получим (1 - 0.6z- + 0,05z-2)E2(z) = 5(1 -Ь 0,25z-)E-(z) (9-88) Возьмем обратное z-преобразование от обеих частей этого уравнения и выразим e*(t) = 5e*(t) + l,25e*(t - Т) Ч- 0,6e*(t - Т) - 0,05e*(t - 2Т) (9-89) где Т - период квантования. Структурная схема непосредственного программирования (9-87) по уравнению (9-89) показана на рис. 9.26. Задершт Задершт  Рис. 9.25. Структурная схема параллельного программирования (z) e*(t-T) Задертиа - eUt-гТ) Рис. 9.26. Непосредственное п1>ограммироваиие передаточной функции (9-87) **1A , Завертка f>- Завершка  Рис. 9.27. Непосредственное программирование передаточной функдаи (9-87) Задертка дертка 1+0,25г-< . 1-D,50Z- 1-0,12 I Рис. 9-28. Последовательное программирование передаточной функции (9-87) 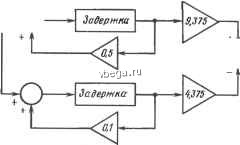 Рис. 9.29. Параллельное программирование передаточной функции (9-87) Применяя к выражению (9-87) декомпозицию, получим .E2(z) = (5 + 1.25z-l)X(z) X(z) = Ej(z) + 0,6z-X(z) - 0,05z-2x(z) Эти два уравнения реализуются в виде программы, структура которой изображена на рис. 9.27. 2 Последовательное программирование. Правую часть выражения (9-87) произвольным образом запишем в виде щюизведения двух функций: (9-90) (9-91) 2() 1 + 0.25z- 5 W l-0,5z-l l-0,lz-На рис. 9.28 представлена структурная схема программы, соответствующей выражению (9-92). 3. Параллельное программирование. Правую часть выражения (9-87) разложим на сумму элементарньтх дробей 2) 9.375 4.375 Ei(z) i-0,5z-l l-0,lz-l На рис. 9.29 показано, как передаточная функция реализуется в виде параллельного соединения двух программ пфвого порядка в соответствии с (9-93). (9-92) 9.5. СИНТЕЗ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ С ЦИФЮВЫМИ РЕГУЛЯТОРАМИ С ПОМОЩЬЮ БИЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ Ниже рассмотрено применение частотного метода к синтезу цифровой системы управления с цифровым регулятором. Такая задача решается прош.е, нежели задача синтеза цифровой системы с аналоговым регулятором, поскольку передаточные функции цифрового регулятора и управляемого процесса разделены квантователем и, следовательно, эффект изменения настройки регулятора можно исследовать с помошью логарифмических частотных характеристик. В соответствии со структурной схемой, изображенной на рис. 9.30, можно сформулировать основные этапы процедуры синтеза. 1. Вьгаислигь z-преобразование GhoGp{z) для соединения экстраполятора нулевого порядка и управляемого процесса. Воспользовавшись w-преобразованием, Z = (1 -Ь w)/(l - w), получить Gf,oGp (w). 2. Построить логарифмические характеристики для Gf,oGp(w), отразив зависимость амплитуды (в дБ) и фазы от со. Если необходимо, перенести данные на диаграмму Никольса. По этим кривым определить показатели качества нескорректированной системы: запас по модулю, запас по фазе, полосу пропускания, резонансный пик и резонансную частоту. 3. Если необходима коррекция системы, то ее передаточная функция в разомкнутом состоянии совместно с цифровым регулятором будет иметь выражение Gf.(z)GQGp(z), или в w-области Gc(w)Gf,oGp(w). Передаточная функция цифрового регулятора G(.(w) должка быть найдена таким образом, чтобы удовлетворялись все требования, предъявляемые к качеству системы. При выборе G(,(w) можно применить принцип синтеза непрерывных систем управления, который основан на методе подбора и в известной степени на опыте и творческой фантазии проектировщика. Так как все действия производятся в w-области, то функция Gf. (w) должна быть выбрана таким образом, чтобы соответствующая передаточная функция цифрового регулятора в z-области Gz) была физически реализуемой. Пусть G (w) имеет вид cw -f с, GJw) = dw -f d f ... -f d., w-f (9-94) Tjxe Пит ~ положительные целые числа. Выясним, при каких ограничениях на и и m и коэффициенты G (w) соответствуюш.ая передаточная функция Giz), получаемая заменой w = (z - l)l{z + I), будет физически реа- Gn(S) Управляемый процесс Рис. 9.30. Система управления с цифровым регулятором
|