
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Рис. 9.18. Реализация цифрового регулятора в виде последовательного импульсного фильтра: а - цифровой регулятор; б - последовательный импульсный фильтр Сс(г1 Ga(s) ложение (z) в степенной ряд не имело положительных степеней z, знаменатель не должен содержать множителя z~ *, если Ф 0. Следовательно, при bo Ф О условием физической реализуемости G(z) является аоФО. Реализация цифровых регуляторов в виде юлпульсных фильтров. Импульсный фильтр - зто электрический четырехполюсник, расположенный между двумя устройствами выборки и хранения. Цифровой регулятор может быть реализован в виде последовательного импульсного фильтра, импульсного фильтра в цепи обратной связи vim. импульсного фильтра комбинированного типа. 1. Последовательный импульсный фильтр. Реализация цифрового регулятора в виде последовательного импульсного фильтра показана на рис. 9.18. Зкстраполятор нулевого порядка,подключенный к выходу цифрового регулятора, указывает на то, что цифровой сигнал, прежде чем поступить на вход непрерывного процесса, подвергается Ц/А преобразованию. Этот зкстраполятор сохраняется и в структурной схеме последовательного импульсного фильтра, показанного на рис. 9.18,6. Передаточная функция Cgf(s), приведенная на рис. 9.18,соответствует произвольной электрической цепи; однако из соображений простоты и дешевизны, предпочтение отдается ?С-четырехполюсникам. На основании рис. 9.18,6 имеем = GboGd(z) = [Gbo(s)GJs)] = (1 - z- Тогда G,(s) 1- z (9-54) (9-55) Это соотношение позволяет определить передаточную функцию последовательного импульсного фильтра по заданной передаточной функции цифрового регулятора Cc(z). Если импульсный фильтр реа.лизуется в виде ЛС-четырехполюснлка, то все полюсы G,j{s) должны быть простыми и должны лежать на отрицательном направлении действительной оси, исключая начало координат и бесконечность. Нули G (s) могут занимать произвольное положение на s-плоскости. Пусть С (s) представлено в виде разложения на сумму элементарных дробей: G,(s) (9-56) гдеу1о ид: - константы; Sk (к= 1,2, п) суть простые отрицательные действительные полюсы, z - преобразование этого выражения Gd(s) - Г7 1 1 e z (9-57) 1 - z ki имеет простые положительные действительные полюсы внутри единичной окружности и только один полюс г = 1. Сравнивая выражения (9-57) и (9-55), легко видеть, что для соответствия С(х) 7?С-четырехполюснику передаточная функция G, (z) должна обладать следующими свойствами: число полюсов С) должно быть больще числа нулей этой функции или равно ему; нули G(. (z) являются произвольными; полюсы Gf. (z) должны быть простыми, действительными, положительными и меньше единицы. Ниже приведен пример, иллюстрирующий реализацию цифрового регулятора Е виде импульсного ЛС-фильтра. Пример 9.4. Задана пфедаточная функция цифрового регулятора G,(z) = l: (9-58) Пфиод квантования Г = 1 с. Требуется реализовать G(,{z) в виде последовательного импульсного фильтра в соответствии со структурной схемой на рис. 9.18,6. Поскольку G(,{z) удовлетворяет трем сформулированным выше условиям,.то, подставив (9-58) в (9-55), получим I - 0,5z (l-z-)(l-0,2z-l) Разложим последнее выражение на элементарные дроби: Ga(s)l 0.625 I 0.375 1 - 0,2z Таким образом. d 0,625 I 0.375 S + 1 S S S + 1,61 s(s -I-1,61) fd(>=rTiii (9-59) (9-60) (9-61) (9-62) Передаточная функция (9-62) реализуется в виде /гС-четырехполюсника, показанного на рис. 9.19. Импульсный фильтр получим, дополнив эту схему на входе и выходе квантователями и фиксаторами, как показано на рис. 9.18,6. 2. Импульсный фильтр в цепи обратной связи. На рис. 9.20,6 показана структурная схема импульсного фильтра, реализующего функции цифрового регулятора. Непрерьшная передаточная функция Я(х) соответствует электрическому четырехполюснику, предпочтительно iC-схеме. Чтобы передаточные функции обеих систем, изображенных на рис. 9.20, были одинаковы, должно выполняться следующее условие: Gjz) = p- (9-63) СЧОмкФ hoH(z) Рис. 9.19. Схема, реализующая передаточную функцию Gd(s) = (s+ l)/(s+ lv61) Рис. 9.20. Реализация цифрового регулятора с помощыо импульсного фильтра в цепи обратной связи: а - цифровой регулятор; б - эквивалентный импульсный фильтр Таким образом, 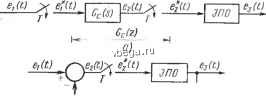
H(s) 1 - GJz) G,(z) (9-64) Отсюда видно, что налицо задача, идентичная случаю коррекции с помощью аналогового регулятора в цепи обратной связи (см. п. 9.3). Действительно, выражение (9-64) имеет тот же вид, что и (9-42). Следовательно можно воспользоваться результатами, полученными выше. Таким образом, чтобы H(s) можно бьшо реализовать в виде ?С-четырехполюсника, передаточная функция цифрового регулятора G, (z) должна обладать следующими свойствами: 1) Gf. (z) должна иметь одинаковое число полюсов и нулей; 2) полюсы Gc (z) могут быть произвольными; 3) нули G(. (z) должны быть простыми, действительными, положительными и должны лежать внутри единичной окружности. Заметим, что при данной структуре ограничения накладываются на положение нулей, а не полюсов G(.{z). Действительно, функция H{s) может быть реализована в виде /?С-четырехполюсника, даже если G(,{z) имеет полюсы вне единичной окрзности и, следовательно, регулятор неустойчив. Пример 9.3 можно рассматривать одновременно как иллюстрацию метода синтеза импульсного фильтра в цепи обратной связи. 3. Импульсный фильтр комбинированного типа. Реализация передаточной функции цифрового регулятора с помощью рассмотренных выше двух типов импульсных фильтров связана с определенными ограничениями. Если передаточная функция цифрового регулятора имеет комплексные полюсы и нули или полюсы и нули, расположенные на единичной окружности или вне ее, то функция не может быгь реализована ни с помощью последовательного импульсного фильтра, ни с помощью импульсного фильтра в цепи обратной связи. При последовательной структуре нули передаточной функции Gg (г) могут быть произвольными, а при структуре с обратной связью произвольными являются полюсы Gf. (z). Это означает, что определенное сочетание двух типов структурньгх решений может снять все ограничения на характер полюсов и нулей функции Gf, (z), разумеется, за исключением того, что функция Gc (z) должна быть физически реализуемой. Возможны различные варианты таких сочетаний, но мы рассмотрим простой комбинированный импульсный фильтр, изображенный на рис. 9.21. Можно показать, что любая физически реализуемая передаточная функция цифрового регулятора Gc (z) может быть представлена импульс-
|