
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Управляемый =г процесс Управляемый процесс С(К) Наблюватш Рис. 9.5. Цифровая система управления с Рис. 9А. Цифровая система управления с обратной связью по состоянию обратной связью по состоянию и наблю- дателем
Рис. 9.7. Цифровая система управления с обратной связью по выходу преобразуется матрицей коэффициентов обратной связи G. Поскольку в общем случае выходных переменных меньше, чем переменных состояния, то с точки зрения синтеза систем обратная связь по выходу менее эффективна, чем обратная связь по состоянию. G(s)Gp(s) (9-1) 9.2. ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯ С ПОМОЩЬЮ АНАЛОГОВЫХ РЕГУЛЯТОРОВ Рассмотрим синтез цифровой системы управления с аналоговым регулятором, включенным последовательно, как показано на рис. 9.1. Поскольку регулятор расположен между экстраполятором и управляемым процессом, запишем импульсную передаточную функцию разомкнутой системы в виде ig} = 5[Gho(s)G,(s)Gp(s)] = (1 - Z-1) Целью синтеза является определение физически реализуемой переда-точной функции Gc (s) аналогового регулятора, обеспечивающего требуемые показатели качества цифровой системы управления. К сожалению, как следует из выражения (9-1), передаточная функция Gc(s) преобразуется совместно с функцией процесса Gp (s), позтому нельзя независимо исследовать эффект, производимый регулятором. Ниже рассмотрен метод аппроксимации цифровой системы аналоговой моделью и объяснено, почему его следует применять с осторожностью. Приведен также метод синтеза на основе н-преобразования. Аппроксимация операции выборки и хранения постоянным запаздыванием. Метод, которым инженер-практик часто пользуется, чтобы аппроксимировать дискретную систему аналоговой моделью, основан на замене устройства выборки и хранения звеном чистого запаздывания. Строго говоря, такая замена не является точной, и к применению этого метода для решения задач синтеза следует относиться с большой осторожностью. Воспользуемся выражением (2-108) для частотной функции экстраполятора нулевого порядка: Sin7r(c0/C0 ) -JB(c/o;) (9-2) с учетом этого выражения запишем импульсную передаточную функцию (в частотной области), соответствующую произведению Сд (s) Gf, (s) Gp (s), в виде 1 °° ы + noj. 1 °° ы + nco 2 (9-3) Поскольку в большинстве систем управления Gp(/co) имеет свойства фильтра нижних частот, а отношение sin 1/2 (со + cos.)77{ 1/2 (со + исо)?] на низких частотах приблизительно равно единице, то Go G G*Qcj) можно аппроксимировать только первым членом ряда (п=0). Тогда GhoGG*(jco) = GJjco)Gp(jco)e-i-r/2 (9-4) а это означает, что операция выборки и хранения заменяется чистым за-паздьтанием, равным половине периода квантования. Полученная таким образом эквивалентная непрерывная система изображена на рис. 9.8. Эффект замены операции выборки и хранения чистым запаздыванием наглядно поясняется с помощью рис. 9.9. Рисунок показьшает, что если аппроксимировать выходной сигнал экстраполятора нулевого порядка штриховой кривой, проходящей через середины плоских вершин соответствующих импульсов, то будет получен непрерьшный сигнал почти такой же формы, как сигнал на входе квантователя, но сдвинутый в сторону запаздьшания на половину периода квантования. Однако следует предупредить, что такой способ аппроксимации не применим к широкому классу импульсных систем управления. Вообще говоря, не ясно, достаточно ли одного члена для аппроксимации бесконечного ряда (9-3), и не вполне r(t)
-c(t) Рис. 9.8. Аппроксимация импульсной системы, изображенной на рис. 9.1, в виде непрерывной системы с запаздыванием 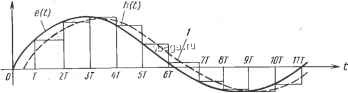 Рис. 9.9. Типичные процессы, иллюстрирующие замену операции выборки и хранения чистым запаздыванием Т/2: 1 - аппроксимация h (f) понятно, почему аппроксимирующая кривая должна иметь такой вид, как на рис. 9.9. Следовательно, непрерывную систему с запаздыванием (см. рис. 9.8) допустимо использовать в качестве аппроксимации импульсной системы (см. рис. 9.1) только при достаточно малом периоде квантования. В противном случае, если бы все импульсные системы можно бьшо аппроксимировать непрерывными системами с запаздыванием, не бьшо бы необходимости разрабатывать и изучать методы анализа и синтеза цифровых систем управления. Однако если замена УВХ звеном запаздывания является обоснованной, то к эквивалентной системе можно непосредственно применять методы синтеза, разработанные для непрерывных систем управления. Рассмотрим пример, иллюстрирующий скрытые опасности, связанные с аппроксимацией УВХ звеном запаздывания. Пример 9.1. Пусть в системе, изображенной на рис. 9.1, управляемый процесс имеет передаточную функцию V) = i(FfT) (9-5) причем К - 1,57 и 7 = 1,57 с. Полагая сначала, что регулятор отсутствует, т. е. G(,{s) = 1, запишем импульсную передаточную функцию эквивалентной системы с запаздьшанием (см. рис. 9.8): Подставляя (9-5) в (9-6), получим GhoG() - s(rTl) (9-7) Логарифмические частотные характеристики для этой передаточной функции при К = 1,57 и Г = 1,57 с изображены на рис. 9.10. На рисунке видно, что в нескорректированной системе, т. е. при (s) = 1, запас по фазе приблизительно равен нулю. Если же не прибегать к аппроксимации УВХ звеном запаздывания и построить точные характеристики для GoG*(/co), то запас по фазе будет составлять около 15 . Таким образом, аппроксимация импульсной системы выражением (9-4) обычно дает пессимистическую оценку устойчивости. Кроме того, истинная фазовая характеристика для GfioGlfoj) претерпевает разрьш при со = со (в нашем примере 4 рад/с), так как член sin (1/2)(соГ)/[(1/2) (соТ) ] в этой точке меняет знак. Если же пользоваться выражением (9-4), то фазовая характеристика будет непрерывной при всех значениях со. Предположим теперь, что при синтезе системы требуется обеспечить запас по фазе не менее 45°. В непрерьшной системе для этого можно попытаться использовать регулятор, дающий либо опережение по фазе (фильтр верхних частот), либо отставание по фазе (фильтр нижних частот). На рис. 9.10 видно, что фазовая характеристика GoG*(/co) резко убывает после частоты 1 рад/с, поэтому регулятор с опережением по фазе в данном случае может оказаться неэффективным. Как известно [ 1 ], регулятор с опережением по фазе приводит к увеличению частоты среза и, следовательно, дополнительного положительного фазового сдвига может
|
|||||||||||||||||||||||