
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем 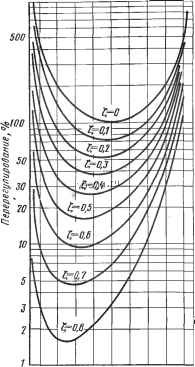 Рис. 6.12. Относительное перерегулирование дискретных систем управления второго порядка 220 200 180 160 120 100 80 10 20 О
-90 -70 -50 -30 -10 О 10 30 50 tf,... Рис. 6.13. Время максимума переходной функции дискретных систем второго порядка -so -60-10-20 О 20 40 60а,.. При Т = ОД25 с передаточная функция замкнутой системы (6-13) принимает 83531.25(z + 1) 83644z2 + 58893,25z Н- 24525,25 (647) Эта функция имеет нуль z = - I и два полюса z =Pi = - 0,352 /0,4114 и г = pi = = - 0,352 - /0,4114. Их положение на z-плоскости показано на рис. 6.14. Из рис. 6.14 имеем: а = -40.66° (6 *8> Фт=соТ= 130.55° = 2,278 рад IPl I = 0.54 Подставляя значения ipi (в радианах) и IPi I в выражение (6-45), найдем коэффициент затухания f = 0.26 Поскохшйу а и ? известны, по номограмме (см. рис. 6.12) определяем максимальное пере1зегулирование. в данном случае интерполяция дает значение, близкое к 50 %. ,тат очшь хорошо согласуется с графиком переходной функции, показан-на рис. 6.7, на котором максимальное перерегулирование чуть больше 50 %. / Теперь рассмотрим, что будет при Т= 0,01 с. Передаточная функция замкнутой системы (6-13) имеет вид 165(z -I-1) () 83644z2 - 160783Z + 77469 (649) z-плоскость 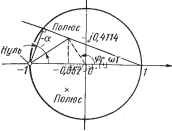 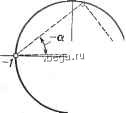 jImz z-плоскость o T1l -Rez  Рис. 6.14. Положение нуля и полюсов Рис. 6.15. Положение нуля и полюсов передаточной функции (6-47) при Т = передаточной функции (6-47) при Т = = 0;Z25 с = 0,01 с Эта функция имеет нуль z = - 1 и два полюса z = р, = 0,96 + /0,0494 и z = pj = = 0,96 - /0,0494. Их положение показано на рис. 6.15, откуда имеем: а = -37.56° = 2.95° = 0.0514 рад ip 1 = 0.9613 Воспользовавшись соотношением (6-45), найдем коэффициент затухания замкнутой цифровой системы управления f = 0.609 Максимальное перерегулирование, найденное с помощью рис. 6.12, составляет примерно 10 %,что очень хорошо согласуется сточным значением, определяемым по переходной функции для Т= 0,01 с, представленная на рис. 6.7. Время максимума для двух рассмотренных выше случаев можно вьиислить непосредственно по формуле (6-46) или найти с помощью рис. 6.13. Для Т = 0,225 с. по формуле (6-46) имеем ,j 0,225 max 130,66 ДляГ= 0,01 с arctg -0.26 -I- 40.66° -(-180°) = 0,354 с 2,95 Т .. = [ arctg , + 37.56° 180°\ = 0.61 v/l-O.i ,609 (6-50) (6-51) Те же результаты можно было бы получить, воспользовавшись номограммой, приведенной на рис. 6.13. Они также очень хорошо согласуются с переходными функциями, показанными на рис. 6.7. 6.5. КОРНЕВЫЕ ГОДОГРАФЫ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ Метод корневого годографа на s-нлоскости утвердился как полезный инструмент анализа и синтеза непрерывных систем управления. Корневой годограф непрерывной системы управления, по существу, является диаграммой траекторий корней характеристического уравнения как функ- цией некоторого параметра К, который изменяется от - °° до °°. Корневой годограф дает возможность судить об абсолютной и относительной устойчивости системы управления в зависимости от этого параметра. Поскольку характеристическое уравнение линейной стационарной цифровой системы управления является рациональным полиномом относительно Z, то те же правила, которые были предложены для построения корневых годографов на s-плоскости, могут быть применены и на z-плоскости. В принципе корневой годограф цифровой системы управления можно построить на s-плоскости, воспользовавшись характеристическим уравнением, полученным из полинома в знаменателе передаточной функции замкнутой системы C*(s)/R*(s), однако он будет содержать бесконечное число ветвей. Чтобы проиллюстрировать трудности анализа цифровых систем на s-плоскости, рассмотрим импульсную передаточную функцию замкнутой цифровой системы управления, заданную в виде C*(s) G*(s) . (6-52) R*(s) 1 -I- G*(s) где G*(s) - дискретная функция от Итак, G.,S) = I J G(s . in..) , К ( 4) Известно [1], что траектории корней уравнения 1 + G*(s) = О могут быть построены на основе информации о полюсах и нулях передаточной функции разомкнутой системы G*(s). В данном случае функция G*(s) имеет бесконечное число полюсов, как показано на рис. 6.16, д. Следовательно, корневой годограф уравнения 1 + G*(s) = О содержит бесконечное число ветвей, как показано на рис. 6.16,6. Ясно, что для цифровых систем управления с более сложными передаточными функциями построение корневых годографов на s-плоскости будет более трудоемким. Использование z-преобразования отображает бесконечное число полюсов и нулей, а значит, и траекторий корней на s-плоскости в конечное их число на z-плоскости. Для системы, описываемой уравнением (6-52), z-преобразование дает Ш = G(z) (6-55) R(z) 1 + G(z) а корни характеристического уравнения находят путем решения 1 + G(z) = О (6-56) где в соответствии с G(s) вида (6-53) G(z)=/[G(s)]= Г - (Z- l)(z- е М Теперь траектории корней характеристического уравнения (Z - l)(z -е-)+ К(1 - e-)z = О (6-58)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||