
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Подставляя параметры системы в два последних выражения, имеем 1.65 X 10T(z+ 1) ~ 83644z2 (g34 X ют - 167288)z + 83644 - 6,34 X ЮТ (6-12) C(z) 1.65 X 10T(z-b 1) Az2 -1- Bz -1- с (6-13) где Л = 83644; 5 = 6,34-10Г - 167288+ 1,65-107; С = 83644 -- 6,3410Г+ 1,65-lOr. Характеристическое уравнение получается путем приравнивания к нулю знаменателя (6-13): Az2 -ь Bz -Ь С = О (6-14) где Л, ВиС имеют приведенные выше значения. Поскольку теперь имеется дополнительный параметр системы в виде периода квантования Т, то ее качество зависит от значений Кр, К, Jy и Т. Чтобы цифровая система управления бьша асимптотически устойчива, корни ее характеристического уравнения должны лежать ка z-hhockocth внутри единичной окружности г= 1. Очевидно, однако, что цифровая система второго порядка при больших значениях Т может быть неустойчива. Применяя к характеристическому уравнению (6-14) критерий устойчивости Джури, находим диапазон устойчивости по параметру Г: О < Г < < 0,264 с. На рис. 6.6 изображена диаграмма положения корней уравнения (6-14) при изменении Г от О до °°. Эта диахрамма известна как корневой годограф [] ]. В данном случае корневой годограф построен путем задания значений Г и решения уравнения (6-14). Обычный способ построения корневого годографа [1] здесь не может быть применен, поскольку параметр Г нелинейно (как 7) входит в уравнение (6-14). На рис. 6.7 представлены переходные функции цифровой системы управления для нескольких значений периода квантования Т. Отметим, что если период квантования стремится к нулю, то переходная функция цифровой системы стремится к соответствующей характеристике непрерывной системы. г - п посметь 1 т=о.т --Re 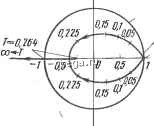 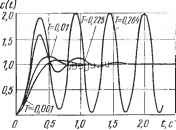 Рис. 6.6. Траектории корней уравнения (6-14) при изменении периода квантования Т: 1 - единичная окружность Рис. 6.7. Переходные функции цифровой системы управления, изображенной на рис. 6.5 Качество установршшегося режима цифровой системы управления можно определить весьма просто, используя теорему о конечном значении. В случаях когда эта теорема применима, она является самым простым методом оценки установившейся ошибки. Теорема о конечном значении не применима, если замкнутая система неустойчива или же ее выходная переменная не успевает отслеживать изменение входного сигнала, и ошибка неограниченно возрастает. Установршшаяся ошибка цифровой системы управления определяется выражением lira е(кТ) = lim (1 - z )E(z) (6-15) к->~ Z-.1 Из рис. 6.5 имеем E(z) = R(z) - C(z) = (6-16) Для единичного ступенчатого воздействия i?(z) = z/(z - 1). Подставляя (6-16) в (6-15),имеем lim е(кТ) = lim , 1 . (6-17) к..- Z-.1 1 + (- (г) V Подставляя G(z) из выражения (6-10) в (6-17), получим lim е(кТ) = О (6-18) к- поскольку G(z) °° npHZ 1. Таким образом, цифровая система управления космическим кораблем способна отработать ступенчатый входной сигнал без установившейся ошибки. Рассмотрим теперь входной сигнал r(t) в виде единичной линейной функции, r{t) = tUgt). Она имеет z-преобразование Установившаяся ошибка системы lime(kT)=Urn (6-20) Подставляя G(z) из выражения (6-10) в (6-20) и переходя к пределу, получим 2К + ТК ише(кТ)= Р (6-21) Таким образом, при линейно-меняющемся входном сигнале установившаяся ошибка цифровой системы постоянна и зависит от К, Кр и Т. Если положить Г = О, то Hm e(t) = К/Кр (6-22) что в точности равно установившейся ошибке непрерывной системы управления космическим кораблем при единичном линейном входном сигнале. Из рассмотренного выше простогопримера, по результатам анализа непрерывной и цифровой системы управления, можно сделать следуюшие выводы. 1. При одних и тех же структуре и параметрах системы цифровая система обьино менее устойчива, чем непрерывная. (В гл. 5 был рассмотрен метод переоборудования систем управления на базе ЭВМ и бьшо показано, как выбрать параметры цифровой системы, чтобы она обладала такой же реакцией, как и непрерывная система). 2. ЬСачество цифровой системы зависит от периода квантования Т. Его возрастание обычно способствует увеличению выброса переходной функции и в конечном счете может привести к неустойчршости системы. 3. Из корневого годографа (см. рис. 6.6) вытекает еще одна характерная особенность анализа цифровых систем управления. При мальгх значениях Т корни характеристического уравнения на г-плоскости располагаются очень близко к точке z = 1. Концентрация доминирующих корней около точки z = 1 часто создает две практические сложности при анализе цифровых систем. Во-первых, по положению корней на г-плоскости становится трудно предсказать поведение замкнутой системы. Такие характеристики, как кривые постоянного коэффициента затухания, постоянной частоты и др., определяются неточно, если все корни группируются в одном месте. Во-вторых, проблема точности может возникнуть и при попытке отыскания близких по значению корней с помощью ЭВМ. 6.3. связь МЕЖДУ ВРЕМЕННОЙ ХАРАКТЕРИСТИКОЙ И ПОЛОЖЕНИЕМ КОРНЕЙ НА s- И z-ПЛОСКОСТЯХ В П. 3.3 бьшо установлено соответствие между областями s- иг-плоскостей. В частности, на г-плоскости были построены кривые равных значений фактора затухания, коэффициента затухания и частоты. Эти кривые позволяют предсказать качество цифровой системы управления. Для непрерывных систем известна связь между положением на х-плос-кости корней характеристического уравнения и переходной функцией. Например, комплексно-сопряженные корни, расположенные в левой половине s-плоскости, обусловливают экспоненциально затухающие синусоидальные процессы; корни на отрицательной части действительной оси соответствуют монотонно затухающим процессам; простые сопряженные корни на мнимой оси приводят к возникновению незатухающих гармонических колебаний с постоянной амплитудой. Кратные корни на мнимой оси и корни в правой половине s-hhockocth соответствуют расходящимся процессам. Хотя мы и установили связь между s- иг-плоскостями, однако операция квантования в цифровых системах вызывает эффекты, требующие особого внимания. Если, например, импульсная теорема не выполняется, то эффект смещения полюсов в результате квантования может привести к искажению реакции системы. На рис. 6.8, а изображены полюсы передаточной функции непрерывной системы второго порядка, а на рис. 6.8, б - сво-бодное движение системы. Если в системе производится квантование с
|