
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем
r(fiT) е(кГ) ЦкП nis) (s) X,(s) C(sl Рис. 4.18. Диаграмма состояния для импульсной системы управления, изображенной на рис. 4.16. Для периода квантования Г = 1с и единичного ступенчатого входного воздействия r(ty = Ugit) имеем в(\) = 0.632 0.632 -0.632 0.368 0.368 0.632 Тогда [zl-0(l)]-lz = Z + 0.632 Z-0.632 -0.632 0.632 Z - 0.368 Z-0.368 0.632 -0.632 Z - 0.632 (4-404) (4-405) (4406) т = Г [[zl-0(l)]-lz e--23k( o.378sin0.88k + cos0.88k) -fe-°-23ksin 0.88k e-°-23(-0.786sin0.88k + cos0.88k) Кроме того, 0[(Ы-к-1)]в(1) = (4407) (4408) x(N) = g-0.23(N-k-l)jQ 493gj 0 88(f l) + 0.368cos0.88(N-k-l)l g-0.23(N-k-l)j Q 8g5gj o.88(Nk-l) + 0.632cos0.88(N-k-l)] Поэтому дискретное уравнение переходных состояний систеглы имеет вид e-0-23N( o 378gin0.88N + cos0.88N) e-°-23Nsin0.88N g-0.23Ngj Q ggf e°-2(-0.786sin0.88N + cos0.88N) g-0.23(N-k-l)jQ 4933Jn0.88(N-k-l) + 0.368cos0.88(N-k-l)] Xj(0) IViaN= 1,2,3, g-0.23(N-k-l)j o 865sin0.88(N-k-l) + 0.632cos0.88(N-k-l)] (4409) Рис. 4.19. Диаграмма состояния для D(z) = = (а,+a,z )/(l + b.z-) Пример 4.15. Проведем анализ в пространстве состояний импульсной системы с цифровым регулятором. Рассмот-biyXsfi) 1/(г) Р структурную схему, изображенную Х(КТ) u(hT) а рис. 4.14. Цифровой регулятор, который может быть реализован на основе ЭВМ, описывается передаточной функцией ,-1  е(кТ) D(z) = Bg -I- ajZ l + biZ (4-410) a G(s) задается выражением (4-397). Необходимо изобразить диаграмму состояния и получить переходные уравнения состояния ртя рассматриваемой системы. Применяя к?(7) схему непосредственной декомпозиции, имеем () (1 -I- bjZ-l)X(z) Положим U(z) = (82 + ajZ-)X(z) E(z) = (1 И- bjZ-)X(z) В соответствии с выражением (4-413) имеем .-1-< (4411) (4-412) (4-413) (4-414) X(z) = E(z) - bjZ-X(z) Диаграмма состояния для цифрового регулятора представлена на рис. 4.19 с использованием выражений (4-412) и (4-414). На основании рис. 4.19 запишем уравнения динамики, характеризующие D(z) в виде хз[(к+ \)Т\ = е(кТ) - bix-i(kT) (уравнениесостояния); (4-415) uikT) = a2e(kT)+ (а - aibi)x3(kT) (уравнениевыхода). (4-416) Диаграммы состояния для G(s) и экстраполятора нулевого порядка бьши получены в примере4.14. Диаграмма состояния всей системы представлена на рис. 4.20. Применяя формулу Мэсона для выходных узлов Xi(s) и Xiis) (см. рис. 4.20), получаем а t а, - a bi l(> = Т - о ifkT) + ;7~v X (кТ) -I- - Хз(кТ) + s2(s -I- 1) г(кТ) (4-417) 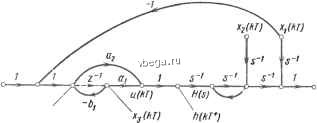 rlht) е(кТ) Уг(б) X,(s) Cfs) Рис. 4.20. Диаграмма состояния для импульсной системы управления, изображенной на рис. 4.14 = i(iTl) -l(T) + Х2(кТ) + Хз(кТ) + г(кТ) (4-418) Заметим, что в этом случае xi(kT), xikT), х{кТ) и гфТ) рассматриваются в качестве входных сигаалов. Примшяя формулу Мэсона также и к хз(Л + \)Т, имеем хз[к -I- 1)Т]= -Xi(kT) - bjXgCkT) -I- г(кТ) Выражение (4-419) совместно с (4-417) и (4-418), если для последних найдеио обратное преобразование Лапласа, при замеие f на (к л- 1)7 образует дискретные уравнения состояния системы
agCT-l + e-) agd-e- ) г(кТ) (4420) Уравнение выхода имеет вид с(кТ) = xi(kT). Теперь можно решить уравнение (4420) с использованием метода, описанного в примере 4.14. 4ЛО. ОПРЕДЕЛЕНИЕ РЕАКЦИИ ИМПУЛЬСНЫХ СИСТЕМ МЕЖДУ МОМЕНТАМИ КВАНТОВАНИЯ С ПОМОЩЬЮ ПОНЯТИЯ СОСТОЯНИЯ Метод пространства состоян.ий может применяться для определения реакции систем между моментами квантования. Он представляет собой альтернативу методу модифицированного z-преобразования. На основании (4-46) находим вектор х(Г) для любого t>toB виде x(t) = 0(t - to)x(to) +\ 0(t - 7)Bu(r)dr (421) если х(о) и u(t) определены для t>to. При условии, что u(f) - константа для to<T<t,загаинем выражение (4421) в виде x(t) = 0(t - to)x(to) -I- Bit - to)u(to) (4422) u(t )=u(7) to<r<t Если теперь требуется определить реакцию между моментами квантования, положим
|