
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем членов ряда представляют собой значения весовой последовательности цифровой системы. Так, коэффициент при члене z соответствует значению весовой последовательности в момент t = кТ. Очевидно, что для физической реализуемости цифровой системы при разложении Z)(z) в степенной ряд в нем не должно содержаться ни одного члена с положительным показателем степени. Положительный показатель степени у z среди членов ряда указывает на наличие упреждения или, другими словами, на то, что вьгходной сигнал предшествует входному. Поэтому, чтобы Z)(z) в выражении (4-377) представляла собой физически реализуемую передаточную функцию, наивысший показатель степени знаменателя должен быть равным соответствующему показателю степени числителя или превосходить его, т.е. и > т. Довольно часто D(z) имеет одинаковое число полюсов и нулей и записывается в виде а , + а z + ... + а, D(z) = -5-;-. (4-378) где пит - положительные целые числа. В этом случае знаменатель D(z) не должен содержать общего множителя . Иными словами, в формуле (4-378) Ьтг 0. Реализация дискретной передаточной функции на ЭВМ в общем случае может осуществляться тремя различными способами: непосредственной, последовательной или параллельной декомпозицией. Эти три метода декомпозиции иллюстрируются ниже в терминах диаграмм состояния. 1. Непосредственная декомпозиция. Предположим, что передаточная функция цифрового регулятора имеет вид п, . C(z) Vi + n +Vi +-+i >=R(I) = .b z-4-b ,z-4-....b,z- (4-379) m+l m m-l 1 где йт + 1 0; m м n - положительные целые числа; C(z) и R{z) - z-преобразования выходного и входного сигналов регулятора, соответственно. Построим диаграмму состояния, поскольку она совпадает с реализацией системы на ЭВМ. Умножим числитель и знаменатель выражения (4-379) на переменную X(z). В результате получим ( (brr,.! + b z-l + b iZ-2 + ... + bjZ- )X(z) (4-380) Приравнивание числителей в последнем равенстве дает C(z) = (а ,1 + a z-i + a iZ-2 +...+ az--)X(z) (4-381) Та же операция для знаменателей приводит к выражению = iK.l + V + rr.-i- + - + biZ--)X(z) (4-382) Чтобы построить диаграмму состояния, выражение (4-382) должно 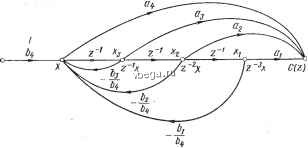 Rlz) Рис. 4.11. Диаграмма состояния Д11я передаточной функции (4-379) при m = п = 3 полученная непосредственной декомпозицией быть записано с указанием причинно-следственных связей. Разрешая выражение (4-382) относительно X(z), получаем X(z)=R(z)-z-iX(z)- (4-383) m-1 2 X(z)-...- X(z) Диаграмма состояния для выражений (4-381) и (4-383) изображена на рис. 4.11 при условии, что т - п = Ъ. Для простоты на диаграмме не представлены начальные состояния. Эта диаграмма может служить основой программы для ЭВМ, при этом ветви с коэффициентами передачи г реализуются временной задержкой или запоминанием на Г секунд. Диаграмма состояния (см. рис. 4.11) может быть использована, конечно, и для аналитических расчетов. Определяя в качестве переменных состояния выходные сигналы узлов всех блоков задержки и применяя формулу Мэсона, можно получить уравнение динамики и переходное урав иение состояния непосредственно из диаграммы состояния. Поскольку дискретные уравнения состояния представляют собой систему разностных уравнений первого порядка, для применения формулы Мэсона блоки задержки с коэффициентом передачи ветви z должны быть исключены из диаграммы состояния. Применяя описанную выше процедуру к диаграмме состояния, показанной на рис. 4.11, запишем уравнение состояния в виде xj(k+ 1)= Х2(к) XgCk-f 1)=-Хз(к) Хз(к + 1) = - Xj(k) - Х2(к) - хз(к) + г(к) (4-384) 4 * 4 А 4 Отсюда можно сделать вывод, что непосредственная декомпозиция всегда приводит к модели системы в пространстве состояний в канонической форме фазовой переменной. 2. Последовательная декомпозиция. Если передаточная функция Z)(z) задана в форме сомножителей, ее можно записать в виде произведения пе- редаточных функций первого порядка, каждая из которых реализуется простой программой для ЭВМ или иллюстрируется соответствующей диаграммой состояния. Исходная передаточная функция D{z) в этом случае заменяется последовательным соединением программ или диаграмм состояния, соответствующих передаточным функциям первого порядка. Предположим, что передаточная функция цифровой системы записана в виде nrz = см = K(-+SH+S)-(+m) (4.385) R(z) (z-f-di)(z-f d2)...(z +d ) где n > m; - Cj, /= 1, 2, .... иг и - dj, / = 1, 2, . . ., 7? - нули и полюсы D{z), соответственно. В общем случае эти полюсы и нули могут быть действительными или комплексными, хотя работа с комплексными числами в программе может представлять трудности. Поэтому форму D{z), задаваемую выражением (4-385), лучше всего использовать для действительных полюсов и нулей. Записывая D{z) в виде произведения коэффициента А и передаточных функций первого порядка, получаем D(2)=KDj(z)D2(z)...D (z) 4 3gg z -Ь с, 1 -f с, z k(> = = 77775 k=m+l,m-f 2,...,n (4.388) Диаграмма состояния для выражения (4-387) представлена на рис. 4.12, а, а для выражения (4-388) - ка рис. 4.12,5. Общая программа, реализующая D{z), получается в результате последовательного соединения элемента К = Оо/Ьо с программами первого порядка для (г), представленными на рис. 4.12. Когда диаграмма состояния построена полностью, непосредственно по ее виду на основании формулы Мэсона могут быть записаны уравнения состояния и выхода. 3. Параллельная декомпозиция. Передаточная функция D{z) может быть реализована также с помощью параллельной декомпозиции; в данном случае в форме сомножителей необходимо представить только знаменатель D(z). Пусть передаточная функция цифровой системы представлена в виде C<z\ z* + az - + ... -f a z -f a, D(z) = Ш = К ~ . .--. . (4-389) 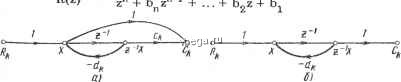 Рис. 4.12. Диаграммы состояний для выражений (4-387) и (4-388)
|