
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Приравнивая соответствующие коэффициенты уравнений (4-337) и (4-347), находим Gl = [g* g] = [-0.76 1] (4-348) Матрица обратной связи исходной системы определяется как G = GiM=[-0.76 1] -1 1 -1 2 = [-0.24 1.24] з Легко показать, что собственные значения матрицы А - BG равны 0,4 и 0,6. Таким образом, управление с использованием обратной связи по состоянию, обеспечивающее требуемые собственные значения, имеет вид и(к) = [0.24 - 1.24] х(Л). 4.17. ДИАГРАММА СОСТОЯНИЯ Метод графов, описанный в гл. 3, применяется к алгебраическим урав--нениям. Поэтому традиционный метод графов может использоваться для описания соотношений входных и выходных сигналов линейной системы-только в области изображений. Здесь метод переходных, графов состоянют будет распространен на разностные уравнения состояния. Для краткости переходный граф состояния назовем диаграммой состояния. В случае непрерывных систем диаграмма состояния имеет сходство со структурной схемой программы для аналоговой вычислительной машины (АВМ). Поэтому при наличии диаграммы состояния задача может решаться либо на АВМ, либо вручную.В случае цифровых систем диаграмма состояния описывает операции, выполняемые гибридной или цифровой вычислительной машиной, так что задача по-прежнему может решаться как машинными, так и аналитическими методами. Диаграмма состояния непрерывных систем. Основными линейны.ми операциями, которые могут выполняться на АВМ, являются умножение на константу, суммирование, изменение знака и интегрирование. Покажем теперь, что эти вьиислительные операции тесно связаны с элементами диаграмм состояния. 1. Умножение машинной переменной на константу в АВМ осуществляется с помощью потенциометров и усилителей. Рассмотрим операцию XgCt) = axi(t) (4-350) где а - константа. Если а люкит между нулем и единицей, то для этих целей используется потенциометр. Если а является отрицательным целым, меньшим или равным - 1, то для реализации выражения (4-350) используется операционный усилитель. Потенциометр и операционный усилитель как элементы структурной схемы показаны на рис. 4.5, а и б соответственно. Поскольку выражение (4-350) является алгебраическим, оно может быть представлено соответствующим графом, изображенным на рис. 4.5, в. Этот граф можно рассматривать как диаграмму состояния или элемент диаграммы состояния, если переменные Xi(t) и X2(t) являются X,(s) Хг(к) хШ. Лга)=ах,Ш Xi(t)=a)(f(t) Xi(t)=ax,(t) Ш. -оо<а<оо а) S) в) 6) Рис. 4.5. Элементы структурной схемы: Рис. 4.6. Изображение на структурной а - потенциометр; б - операционный схеме операционного усилителя, исполь- усилитель; в - диаграмма состояния зуемого в качестве сумматора (а) и операции умножения переменной на кон- представление операции суммирования в станту виде диаграммы состояния (б) переменными состояния или их линейными комбинациями. Поскольку преобразование по Лапласу выражения (4-350) имеет вид X2(s)= aXx(s) (4-351) то фрагмент диаграммы состояния на рис. 4.5, в изображает таюке связь между преобразованными переменными. 2. Алгебраическая сумма двух или более машинных переменных образуется на АВМ с помощью операционного усилителя, изображенного на рис. 4.6, а. В качестве иллюстрации представлено алгебраическое выражение вида K(t) = ajx(t) + a2X2(t) + 83X3(1) (4-352) где все коэффициенты предполагаются меньшими или равными нулю. Диаграмма состояния, представленная на рис. 4.6, б, изображает как само выражение (4-352), так и его преобразование Лапласа. 3. Интегрирование машинной переменной выполняется на АВМ с по--мощью блока, называемого интегратором. Если выходной сигнал интегратора обозначить Xi(t) с заданным начальным условиемXi(to) при t= to,a его входной сигнал - jcj (t), то .интегратор выполняет следующую операцию: X(t) = aX2(7)d7+ Xi(t(,) где a - константа, меньшая или равная нулю. Изображение интегратора на структурной схеме представлено на рис. 4.7,а. В общем случае интегратор может использоваться одновременно как суммирующее и как усиливающее устройство. Для представления операции интегрирования на диаграмме состояния возьмем преобразование Лапласа от обеих частей выражения (4-353): X (s) -О x,(t ) X,(s) =- + а X2(.)dr + (4.354) Поскольку состояние интегратора к моменту to учтено членом л: 1(0) и предполагается, что изменение состояния начинается при Г = Го, то лгг(г) = = О для О < 7 < Го. Тогда выражение (4-354) принимает вид aX (s) x,(t ) X,(s)=-f-+-lii! (t>to) .. (4.355) Рис. 4.7. Изображение интегратора на структурной схеме (а) и диаграммы состояния операции интегрирования (б, в) 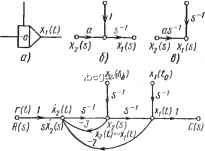 (4-356) Рис. 4.8. Диаграмма состояния системы, описываемой уравнением (4-357) Следует подчеркнуть, что преобразованное выражение (4-355) определено только для t > tf). Поэтому обратное преобразование Лапласа от Xi(s) должно иметь вид xi(t) =-i[Xi(s)] = а j* * X2(7)d7-f- Xi(t(,) Изображение операции интегрирования на диаграмме состояния следует из описания соответствующего графа выражением (4-355). Два варианта представления интегратора на диаграмме состояния показаны на рис. 4.7, б и е. Диаграмма состояния не только используется при моделировании на АВМ, но и может являться источником следующей информации о линейной динамической системе: 1) уравнения динамики, т.е. уравнения состояния и уравнения выхода; 2) переходное уравнение состояния; 3) передаточная функция; 4) переменные состояния. Рассмотрим числовой пример для иллюстрации использования диаграммы состояния при анализе линейных непрерывных систем. Пример 4.11. Предположим, что линейная динамическая система описывается дифференциальным уравнением вида + 3d + 2c(t)=r(t) (4-357) где c(0 - выходной сигнал, а входное воздействие >(f) есть единичная ступенчатая функция. Начальное состояние системы описывается значениями c{to) и dc(tQ)ldt, вычисленными при t = to. Диаграмма состояния, изображенная на рис. 4.8, получена в результате решения уравнения (4-357) относительно старшей производной. Переменные состояния системы jcj (г) vLXiff) определяются как выходные переменные интеграторов. Переходные уравнения состояния системы, преобразованные по Лапласу, следуют непосредственно из диаграмм состояния на основании формулы Мэсона Xi(s) X2(s) (s-f-l)(s-f-2)
(s + l)(s + 2) (s-f-lfe+T) R(s) (4-358) Для единичной ступшчатой входной функции Rs) = 1/s обратное преобразование по Лапласу уравнения (4-358) имеет вид
|