
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем 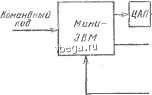 От бойлера Управление сноростые\. Ппапт Турбина *i( 7-*\бозбувшпель Упраблеиие напрятением ТТопучение цифробь/х данных Рис. 1.12. Цифровое управление блоком турбина-генератор: ЭГП - эпектрогидравлкческий преобразователь бтходнд/е переменные Цифробые преобразобапп Цифробой мультиплексор Цифробой Выход на ЗВИ Выходные переменные Рис. 1.13. Подсистема получения цифровых данных Выходные переменные Аналоговый Аналоговый \нультиплексор
Рис. 1.14. Подсистема получения данных с аналоговыми преобразователями. Г1ло6ка считывания -записи
Цифровой в am чип папо1нения Рис. 1.15. Система управления шаговым двигателем для перемещения головки считывания-записи дисковода ЭВМ нии аналого-цифрового и цифроаналогово преобразователей нет необходимости. На рис. 1.15 показана такая система, которая используется для управления головкой считывания-записи дисковода ЭВМ. Для перемещения головки в этой системе используется шаговый двигатель, управляемый командными импульсами. Ротор шагового двигателя перемещается на строго определенный шаг в ответ кг каждый входной импульс. Таким образом, система может быть классифицирована как полностью цифровая. Дискретная модель задачи на выплату займа. Выше мы рассмотрели цифровые системы, которые имеют физическую природу. Существует большое число социальных и экономических систем, которые могут быть описаны дискретными моделями. Аналоговые динамические системы описываются дифференциальными уравнениями относительно переменных, являющихся функциями непрерывного аргумента Г. Динамика дискрет- Рис. 1.16. Дискретная модель для задачи на выплату займа блок завертки ных систем описывается разностными уравнениями. Переменные дискретной модели системы являются функциями дискретной временной переменной кТ{1<. = О, 1, 2, ...), где Т ~ константа, или функция дискретной переменной к. Рассмотрим задачу на выплату займа, которая определяется следующим образом. Предположим, что величина займа равна Fq Проценты на невыплаченную часть займа за период составляют г. Предположим, что выплата займа и процентов должна быть сделана равными платежами и за N периодов. Пусть Ру; есть величина займа, оставшаяся к выплате после А-го периода. Тогда разностное уравнение задачи может быть заштеано следующим образом: РкП = <1 + >Рк - (1-1) где Р/с + 1 - величина выплаты к концу {к + 1) -го периода. Граничными условиями являются заданное значение Fq и Pj = 0. Разностное уравнение (1-1) можно решить относительно и рекурентным методом или методом z-преобразования. Это уравнение известно также как разностное уравнение первого порядка. Ему соответствует структурная схема, показанная на рис. 1.16. СПИСОК ЛИТЕРАТУРЫ 1. Oldenbourg, R. С, and Sartorius, Н., ТЫ Dynamics of Automatic Control. American Society of Mechsnical Engineers, New York, 1948. 2. Gouy, G., On a Constant Temperature Oven, J. Physique, 6, Series 3, 1897, pp. 479483. ГЛАВА 2. ПРЕОБРАЗОВАНИЕ И ОБРАБОТКА СИГНАЛОВ 2.1. ВВЕДЕНИЕ Специалисты по системам управления применяют ЭВМ в двух основных случаях. В первом случае ЭВМ используется для моделирования и расчета динамики систем. Большинство реальных систем описываются уравнениями высокого порядка и содержат нелинейные элементы, что затрудняет использование аналитических методов. Поэтому часто инженеры по управлению проводят анализ и синтез сложных систем управления на ЭВМ. К моделированию на ЭВМ обращаются также для проверки результатов, полученных аналитическими методами. Во втором случае ЭВМ используются в системах управления в качестве контроллеров или процессоров. Так как управляемые процессы в основном имеют аналоговый характер, то в большинстве цифровых систем управления присутствуют как аналоговые, так и цифровые сигналы. Следовательно, необходимо такое преобразование сигналов, которое обеспечивало бы взаимодействие цифровых и аналоговых элементов. Например, выходные сигналы аналоговых устройств должны быть подвергнуты аналого-цифровому (А/Ц) преобразованию перед дальнейшей их обработкой в цифровом контроллере. Аналого-цифровое преобразование может быть описано как операция кодирования. Подобным образом цифровой код контроллера или ЭВМ может быть послан на аналоговые устройства только после цифроаналогового (Ц/А) преобразования. В гл. 1 было показано, что для операции разделения времени требуется специальное интерфейсное оборудование: мультиплексор, квантователь, фиксатор и др. Поскольку эти компоненты чрезвычайно важны для обработки сигналов, они будут коротко рассмотрены в этой главе. Следует, однако, помнить, что обработка сигналов и технические элементы систем не являются главным предметом данной книги. Читатель может получить дополнительные сведения по этим вопросам из книг, список которых приведен в конце главы. Рассмотрение АЦП, ЦАП, мультиплексоров, квантователей и фиксаторов в этой книге определяется возможностью использования их для обработки сигналов и дискретных и цифровых системах и ставит целью создание их моделей и математического описания для анализа и проектирования. Цифроаналоговый преобразователь осуществляет операцию декодирования над цифровыми входными данными. На выходе ЦАП получают аналоговый сигнал, обычно в виде тока или напряжения. ЦАП необходим как интерфейсное средство между цифровым каналом или ЭВМ и аналоговым устройством. ЦАП называют также декодером. Аналого-цифровой преобразователь преобразует аналоговый сигнал
|