
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем 
C(s) Рис, 3.19. Структурная схема цифровой системы управления гоконтурным системам с несколькими квантователями, которые синхронизированы и имеют одинаковую частоту квантования. Модифицированные Z-преобразования для C(s) и£(х) можно получить непосредственно из уравнений (3-227) и (3-228) соответственно. При наличии достаточного опыта уравнения, подобные (3-221) и (3-222), можно получить непосредственно на основе эквивалентного графа. Пример 3.18. Определим метод см дискретных графов непрерывные и дискретные сигналы системы (рис. 3,19) согласно рассмотренной процедуре. 1. Граф системы изображен на рис. 3.20. 2. Используя формулу Мэсона и на основе рис. 3.20 можно записать следующие уравнения: (3-229)
(3-230) (3-231) где£(х) , У; (s) hC(s) - выходные узлы: Л (s) и£*(х) - входные узлы. Для простоты аргумент опущен, т. е. функция £*(s) обозначена как Е% R(s) - как Л и т. д. Определим дискретное преобразование для обеих частей уравнений (3-229) - (3-231), тогда Е* = 1 + G -D* :г-М- Е* 2 J [l + GgJ (3-232) Y* = 4-D* r G, 1 4-G 2-> (3-233) C* = г RG2 П 1 + G 2-> 4-D* rG.Gg-,* 1 + G. (3-234) 3. Используя последние шесть уравнений, построим составной граф системы (рис. 3.21). Рис. 3.20. Эквивалентный граф цифровой системы, показанной на рис. 3.19 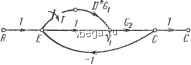 Рис. 3.21. Составной граф системы, показанной иа рис. 3.19 4. Применяя формулу Мэсона к составному графу этой системы, определим ее непрерывные и дискретные выходные сигналы  с* = г RGg 1* Г GjGgI 14-D* rGjGI 1 + G Г RGgi H-G, * Г/ RG, + Vi + gJ Vi + gJ rGjGgi* Так как 1-bG
= R* TO уравнение (3-235) запишем в ввде * + R*D* Г RGg л С* = rG.Gl* H-D* rGjGI* Переходя к z-преобразованию в уравнении (3-237), получим RG C(z) = r(z)-bR(z)D(z)(z) G G 1 + D(z)ji(z) iTg; (z) =T R(s)G2(s) Ll + G2(s)J 3 [C1G2I (1 + G2)] (2) определяется аналогично. Для C(s) как для выходного узла составного графа определяем (3-236) (3-237)
* Для доказательства этого равенства достаточно снять звездочки в обеих частях уравнения и сделать несложные преобразования. 1 + Ggj RGg 1 + G + rGjGgl (3-240) 2 H-D* I + G2J Для Простоты записи в последнем уравнении аргумент s опущен. Метод прямого графа. Метод, предложенный Седлером и Бэки [ 17] является прямым и позволяет определить связь между входными и выходными сигналами на основе графа цифровой системы управления без промежуточных операций. Так как в цифровых системах обычно присутствуют и непрерывные, и цифровые сигналы, необходимо ввести новое обозначение узла для отражения операции квантования. Вводятся два типа узлов: белый узел о используется для представления непрерывных переменных; черный узел используется для представления дискретных, или квантованных, переменных. После введения черных узлов все квантователи и цифровые операции в цифровой системе должны изображаться с их помощью. Кроме того, все узловые переменные нового графа могут быть представлены переменными без звездочки , так как переменная, представленная черным узлом, равна в дискретной форме сумме всех сигналов, входящих в узел. В качестве примера на рис. 3.22 показан граф системы (см. рис. 3.16, б), на котором операция квантования отражена черным узлом. Переменная в черном узле определяется как y,(s)=F*(s). 3 241) Для удобства входная переменная принимается равной единице, для чего вводится ветвь с коэффициентом усиления, равным входному сигналу (см. рис. 3.22) . В дополнение к таким понятиям как узлы и ветви, используемым в традиционном методе графов, необходимо ввести следующие. Сегмент, обозначаемый как о(у, у , есть связь между двумя узлами j и> ,где> - входной, или черный, узел и j - выходной, или черный, узел, а все остальные узлы сегмента а белые. Ни один узел сегмента не следует проходить более одного раза. Связи и петли первого типа содержат только белые узлы, они соответственно обозначаются HV . Связи и петли второго типа содержат по крайней мере один черный узел,они обозначаются соответственному hv Элементарная связь первого типа является элементарной, если при движении по ней любой узел проходят только один раз. Элементарная петля первого типа является элементарной, если любой Рис. 3.22. Граф (см. рис. 3.16, б) с операцией квантования, обозначенной черным узлом
|
||||||||||||||||||||||||||||||||||||||||||||