
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем ГЛАВА 1. ВВЕДЕНИЕ 1.1. ОБЩИЕ СВЕДЕНИЯ Последние годы характеризуются существенным прогрессом в области дискретных и цифровых систем управления. Популярность этих систем во всех отраслях промышленности объясняется как развитием цифровых вычислительных машин, в частности микропроцессоров, так и преимуществами работы с цифровыми сигналами. Дискретные и цифровые системы управления отличаются от непрерывных или аналоговых тем, что сигналы в одной или нескольких точках этих систем представляют собой последовательность импульсов или цифровой код. В литературе по управлению термины импульсные системы , дискретные системы , системы с дискретным временем , цифровыесистемы используются довольно произвольно. Правильнее термин импульсные относить к системам с амплитудной модуляцией импульсов, при которой информационным параметром является амплитуда импульса, термин цифровые обычно относят к системам, в которых сигналы генерируются ЭВМ или цифровыми устройствами в виде кодов. Однако, что будет показано ниже, в реальных системах управления могут присутствовать как аналоговые и импульсные сигналы, так и цифровые коды. Поэтому в книге термин дискретные системы будет использоваться в широком смысле для описания всех систем, в которых сигналы имеют цифровую или импульсную форму. На рис. 1.1 показана типичная импульсная система управления с обратной связью. Квантователь представляет собой устройство, выходной сигнал которого имеет вид периодической или непериодической последовательности импульсов, причем между двумя соседними импульсами информация отсутствует. Рис. 1.2 иллюстрирует принцип работы квантователя. Непрерывный входной сигнал е (t) квантуется по времени, при этом выходной сигнал квантователя представляет собой последовательность импульсов. Предполагается, что в рассматриваемом случае частота квантования постоянна, а амплитуда импульса в момент замыкания определяется соответст-
C(t) Рис .1.1. Импульсная система управления с обратной связью .......К Рис. 1.2. Непрч)ывный входной (а) и дискретный выходной (б) сигналы квантователя Иифродой код вход Упровляемд/й процесс Виход Рис. 1.3. Типичная цифровая система управления вующим значением входного сигнала е (t). Существуют и другие способы квантования сигналов, например, квантование с циклически изменяющимся периодом, многократное, со случайным периодом, с широтно-импульсной модуляцией. На практике наиболее распространены квантование с постоянным периодом и многократное квантование. Различные способы квантования и их особенности будут рассмотрены ниже. Расположенный между квантователем и управляемым процессом фильтр выполняет функцию сглаживания, так как большинство управляемых процессов рассчитано на прием аналоговых сигналов. В цифровой системе управления сигналы в одной или нескольких точках представляются цифровыми кодами, с которыми оперируют цифровая электронная вычислительная машина (ЭВМ) или цифровое устройство. Структура типичной цифровой системы управления показана на рис. 1.3. Наличие в некоторых точках системы сигналов в виде цифрового кода, например, двоичного, обусловливает использование цифроаналого-вого (ЦАП) и аналого-цифрового (АЦП) преобразователей. Хотя между структурами и элементами импульсной и цифровой систем имеются существенные различия, математические описания этих систем достаточно близки, и они могут быть исследованы одинаковыми аналитическими методами. Квантование по времени в системах управления применялось по крайней мере 70 лет назад. В этих ранних разработках импульсная модуляция использовалась для улучшения тех или иных эксплуатационных характеристик систем управления. Например, в гальванометре с падающей дужкой (рис. 1.4), описанном Ольденбургом и Сарториусом [1], с помощью квантования достигается высокая чувствительность системы к маломощному входному сигналу Как показано на рисунке, к катушке гальванометра прикладывается малый сигнал. На стрелку гальванометра периодически опускается падающая дужка, заставляя вал нагрузки поворачиваться на угвл, пропорцио- к нагрузке 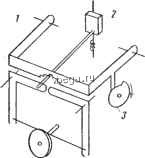 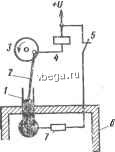 Рис. 1.4. Гальванометр с падающей дужкой: 1 - падающая дужка; 2 - гальванометр; 3 - кугачок Рис. 1.5. Дискретная система стабилизации температуры в духовом шкафу: 1 - ртутный термометр; 2 - контактный стержень; 3 - колесо, вращаемое электродвигателем; 4 - обмотка реле; 5 - размыкающие контакты реле; б - духовой шкаф; 7 - нагреватель Рис. 1:6. Входной (а) и выходной (б) сигналы шнротно-И1\ пульсного модулятора: А (г) - температура духового шкафа; й§(г) - ток нагревателя нальный входному сигналу. Таким образом, поворот вала нагрузки определяется не вращающим моментом гальванометра, а перемещением падающей дужки. Другим известным примером раннего применения квантования по времени в системах управления является система стабилизащш температуры в духовом шкафу [2]. Система содержит элементы, показанные на рис. 1.5. Когда контактный стержень погружен в ртуть, ток проходит по обмотке реле, при этом контакты реле разомкнуты, что вызывает прерывание тока в обмотке нагревателя. Так как стержень погружается в ртуть периодически, ток в обмотке нагревателя представляет собой последовательность импульсов. Более того, поскольку время погружения зависит от уровня ртути, который в свою очередь опредегается температурой в духовом шкафу, то длительность импульсов тока в нагревателе будет изменяться в соответствии с температурой, но амплитуда импульсов будет постоянна. Типичная форма сигналов в такой системе показана па рис. 1.6. Длительность импульсов тока в нагревателе пропорщюнальна амплитуде h{t) при t = пТ. В отличие от процедуры квантования (см. рис. 1.2), в которой амплитуда импульсов определяется амплитудой входного сигнала, при модуляции, показанной на рис. 1.6, амплитуда импульсов остается постоянной, а информационным параметром является длительность импульсов. Такая модуляция получила название широтно-импульсной (ШИМ). На практике используются различные методы мо-дуляг;ии сигналов, или точнее представления сигналов в дискретной форме.
|