
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Сначала предположим, что обратная связь осуществляется только по переменной Xi (кТ), т. е. gi = 0. Характеристическое уравнение замкнутой системы имеет вид Izl - А + BGI = z2 + (gj + 2)z + (1 + 3g i) = 0. (9-317) Поскольку мы имеем только один параметр gi, то два собственных значения замкнутой системы не могут быть заданы произвольно. Разделив обе части уравнения (9-317) на члены, не содержащие gi, получим gl(z-H3) Т-= О (9-318) 4- 2z -И Траектории корней уравнения (9-317), построенные на основании расположения полюсов и нулей функщш (Z -н 3)/ (z -н 2z -н 1) , изображены на рис. 9.56,с. Заметам, что при положительных значениях gj оба корня находятся вне единичной окружности, а при отрицательных один корень всегда остается слева от точки - 1 на z-плоскости. Следовательно, если обратная связь осуществляется только по переменной {кГ), то замкнутая система при любых значениях будет неустойчива. Теперь рассмотрим случай, когда обратная связь осуществляется только по переменной Х2 (ЙГ), т. е. G=[0 gg] (9-319) Характеристическое уравнение замкнутой системы имеет вид Izl - А 4- BGI = z2 -1- (gg + 2)z -f (1 - gg) = О (9-320) Траектории корней последнего уравнения построены с помощью соотношения 1-f-r-= 0 (9-321) z -f 2z -fl и изображены на рис. 9.56,6. В зтом случае при отрицательных значениях g2 оба корня уравнения (9-320) находятся вне единичной окружности, а при положительных один корень всегда остается слева от точки - 1 на z-плоскости. Таким образом, при единственном входном (управляющем) воздействии с помощью неполной обратной связи по состоянию не только невозможно реализовать заданные собственные значения замкнутой системы, но и нельзя обеспечивать ее устойчивость. Изменим структуру системы, взяв матрицу В в виде 1 О О 1 В этом случае матрица обратной связи 4l Ч2 Z-плоскость  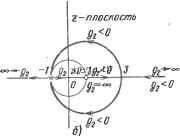 Рис. 9.56. Корневые годографы системы Тогда Izl - А + BGI = z2 + (2 + g + g22)z + gj(2 + g) + (1 - ggl + g) = 0 (9-322) Если отсутствует обратная связь по Xi ikT), то = ёгг = О и уравнение (9-322) принимает вид z + (2 + g22)z + (1 - gig) = О (9-323) Так как в этом уравнении имеются два независимых параметра и g22, то два собственных значения матрицы A-BG можно задать произвольным образом. Аналогично при gii~g22=G имеем z2-(2 + gll)z-г2gll + l + g2l=0 (9-324) Опять-таки, собственные значения можно задать произвольно выбором коэффициентов gn и g2i- Обратная связь по выходу. Поскольку выходные сигналы системы всегда доступны измерению, их можно через постоянные коэффициенты завести обратно на вход и использовать для целей управления. Таким образом, обратную связь по выходу можно считать альтернативой неполной обратной связи по состоянию. Рассмотрим систему х[(к -1- 1)Т] = Ах(кТ) + Ви(кТ) (9-325) с(кТ) = Dx(kT) (9-326) где х(кТ), и(кТ) и с(кТ) - векторы размерностью п, г ирсоответственно. Обратная связь по выходу определяется как и(кТ) = -Gc(kT) (9-327) где G - матрица обратной связи по выходу размерностью гХр. Целью синтеза является определение такой матрицы G, при которой будут получены желаемые собственные значения замкнутой системы. Однако, поскольку в общем случае р<г < л, не все и собственных значений могут быть заданы произвольно. Покажем, что число собственных значений, которые могут быть заданы произвольно, зависит от рангов матриц Ои В. При синтезе системы с обратной связью по выходу можно воспользоваться тем же методом, что и в случае обратной связи по состоянию. Рассмотрим сначала случай единственного входного воздействия. Подставляя выражение (9-326) в (9-327), а затем в (9-325), получим х[(к + 1)Т] = (А - BGD)x(kT) (9.328) Последнее уравнение эквивалентно уравнению замкнутой системы с обратной связью по состоянию, в котором роль матрицы обратной связи играет произведение GD. Поэтому, если пара матриц [А, В] является полностью управляемой, решение для GD можно сразу получить, используя соотношение (9-244) или (9-254): GD= [(MS)-i(a-a)] (9-329) GD=-[Aoi - AonlK- . (9.-330) Однако в общем случае матрицы D и DK не являются квадратными, поэтому выразить G непосредственно из двух последних уравнений не представляется возможным. При единственном входном воздействии G имеет размерность IXр, D-рХк, аВ-иХ1, позтому GD всегда представляет собой матрицу-строку размерностью 1X п. Матрица D содержит р элементов, но только т из них соответствуют независимым параметрам, которые могут быть использованы для синтеза (здесь т - ранг матрицы G, причем m < р). Например, если 10 0 0 12 ООО то ранг этой ТМатрицы равен 2. Если при этом G = [g ggs ], то GD=tgi gg Sgg] т. е. матрица GD имеет только два независимых параметра. Это означает, что с помощью обратной связи по выходу могут быть произвольно заданы лищь два из трех собственных значений системы. В случае единственного входного воздействия, если ранг матрицы D равен п, т. е. порядку системы, обратная связь по выходу дает тот же результат, что и полная обратная связь по состоянию, а именно, если пара [А, В] управляема, то все собственные значения могут быть заданы произвольным образом. Для систем с несколькими входами В имеет размерность пХг, тогда образуется матрица B* = Bw (9-331) где W имеет размерность гХ 1 и содержит г параметров, а значит. В* имеет размерность иХ 1. Аналогично G = wG* (9-332) G*= [g* g* ... g*] (IXn) (9-333) Тогда BGD = BwG*D = B*G*D (9-334) и характеристическое уравнение замкнутой системы имеет вид Izl-А+BGDI= Izl-А+B*G*D= О (9-335) Матрицу G*D можно определить, используя соотношение (9-244) или (9-254). В отличие от случая с единственным входным воздействием, решение для коэффициентов обратной связи по выходу теперь зависит от рангов матриц D и В. В общем случае, если ранг матрицы D больше ранга матрицы В или равен ему, элементы матрицы w могут быть выбраны произвольно, разумеется, при условии управляемости пары [А, В]. Однако при ран-
|