
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Декомпозиция цифровых систем Л-плоскоат 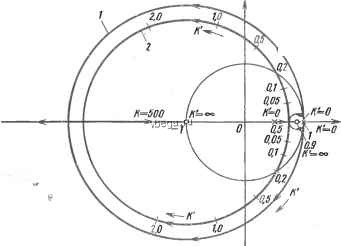 Рис. 9.42. Корневые годографы цифровой системы управления: 1 - без коррекции; 2 - с коррекцией при передаточной ф)пнкции регулятора G, (г) = = 5(г - 0,9)/(г.- 0,5) у которого полюс расположен правее нуля, привел бы к смещению годографа близ точки г = 1 еще дальше вправо. Поэтому логичнее будет попытаться использовать регулятор с опережением по фазе. Пусть передаточная функция регулятора имеет вид (9-131) Z~ плоскость где Zj >pj и ic = (1-Pi)/ (1-zi). При выборе значений Pi и zj учтем, что бьшо бы желательно поместить нуль близ двух полюсов z = 1 функции GoGp (z) На рис. 9.42 изображен корневой годограф скорректированной системы при Zj = 09 и Pj = 0,5. Замкнутая система теперь является устойчивой при КТ < 0,2. Значит, если период квантования 7=0,1 с, то критическое значение К равно 20. Бьшо бы идеальным, если бы нуль можно бьшо поместить в точке z = 1, чтобы скомпенсировать один из полюсов GfjoGp(z). Однако это соответствовало бы АГ В рассмотренном примере полюс Pi произвольно бьш помещен в точке z = 0,5. А как отразилось бы на свойствах системы перемещение Pi по действительной оси внутри единичной окружности? Очевидно, что Pi не следует помещать слишком близко к нулю Zj, иначе регулятор с опережением по фазе не будет достаточно эф- Рис. 9.43. Корневой годограф скорректированной цифровой системы управления при Gc(z) = 15(z - 0,9)/(z-1-Oi) 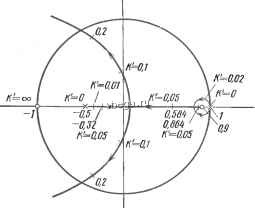 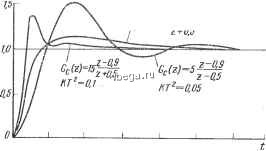 О iT 8Т ПТ WT 20Т 2iT Рис. 9.44. nqjexoflHbie функции цифровой системы управления фективно улучшать условия устойчивости системы. В то же время полюс можно поместить и на отрицательном направлении действительной оси. Это соответствует большему опережению по фазе, так как расстояние между и pj увеличивается. На рис. 9.43 изображен корневой гоцограф для случая, когда цифровой регулятор имеет передаточную функцию Ч 5 Z + 0,5 (9-132) Теперь, если и! = 0,05, то замкнутая система имеет три действительных полюса: Z = - 0,322; 0,584 и 0,864. При больших значениях К, что соответствует двум комплексно-сопряженным корням, собственная частота системы выше, поэтому время нарастания переходной функции будет меньше, чем в случае = 0,5. На рис. 9.44 показаны переходные функции синтезированной системы для двух различных регуляторов и двух значений К. При регуляторе с пфедаточной функцией (9-131), где Zj = = 0,9 и Pl = 0,5, переходная функция имеет максимальное Пферегулирование более 50%, несмотря на то что достигается значение относительного коэффициента затухания f = 0,707. При регуляторе с передаточной функцией (9-132) и КТ =Л: = 0,05 переходная функция имеет максимальное перерегулирование всего 15%. При том же регуляторе, но в случае К = 0,1, быстродействие увеличивается, хотя максимальное перерегулирование возрастает до 38%. Метод контуров корней [ 1]. Обычно при построении корневого годографа замкнутой системы управления варьируемым параметром считают коэффициент усиления К, а остальные параметры системы полагаются постоянными. Однако часто необходимо исследовать влияние изменения не только коэффициента усиления К, но и других параметров. Для этой цели используется контур корней, который, по сути дела, является корневым годографом, сохраняя все его свойства. Единственное отличие заключается в том, что варьируемым параметром на контуре может быть любой другой параметр системы, кроме коэффициента усиления. Например, при синтезе системы в примере 9.8 был использован цифровой регулятор с опережением по фазе. При решении задачи мы выбрали нуль регулятора Zl = 0,9 и исследовали, как изменится корневой годограф, если полюс поместить сначала в точке Pi = 0,5, а затем в точке - 0,5. Бьшо бы желательно исследовать эффект, связанный с непрерывным изменением Pi в диапазоне от - до °° при постоянстве остальных параметров системы. Проиллюстрируем метод контуров корней на системе, рассмотренной в примере 9.8. Передаточная функция разомкнутой системы с цифровым регулятором имеет вид 1 - Pi Z - KTfZ + l Ge(-) GhoGpCO = 1 2(z l)2 (9-133) Пусть Zl =0,9 и KT = 0,05, тогда {,r n , л 1~ Pi z-.0,9 0,65(z + 1) Gc(-)GhoGp(-) = 2(z l)2 (9-134> Характеристическое уравнение замкнутой системы получим, приравнивая нулю числитель выражения 1 + i)GhoGp (г): (z-pj)(z- 1)2 + 0,25(1 - Pi)(z + l)(z- 0,9)= О (9-135) Поскольку это уравнение содержит только один параметр Pi, то можно воспользоваться правилами построения корневого годографа. Траектории корней уравнений, получаемые при изменении pi, называются контурами корней. Раскрьшая левую часть уравнения (9-135) и группируя члены, содержащие Pi, получим z3 - l,75z2 + l,025z - 0,225 - l,25pj(z2 - l,58z + 0,62) = 0 (9-136) Деление обеих частей последнего уравнения на члены, не содержащие Pi, дает -l,25p-(z2 - l,58z + 0,62) z3-l,75z2-H,025z~ 0,225 (9-137) Теперь уравнение (9-137) представлено в виде l + Gg (z) = О, где Pi входит в Gg (z) как множитель. Это означает, что можно построить контуры корней уравнения (9-136) на основании расположения полюсов и нулей функции Gg (z), которую запищем в виде -l,25pj(z- 0,726)(z- 0,854) е(2) = (Z - 0,867)(z - 0,441 + j0;254)(z ~ 0,441 - j0,254) (9-138) Контуры корней уравнения (9-136) при изменении Pi от - = до = изображены на рис. 9.45. Поскольку Pi принимает все возможные действительные значения, то при Zj = 0,9 эта диаграмма имеет силу для регуляторов как с отставанием, так и с опережением по фазе. Ясно, что для регулятора с отставанием по фазе, когда Pi > Zj = 0,9, по крайней мере, один из корней характеристического уравнения замкнутой системы находится вне единичной окружности и система неустойчива. Если используется регулятор с опережением по фазе, когда Pi < Zj = 0,9, диаграмма показывает, что предпочтительнее выбирать отрицательные значения pi. Однако Pi не может быть меньще, чем - 1. В противном случае один из корней снова окажется вне единичной окружности. При отрицательньгх значениях pi один из трех корней всегда будет лежать в интервале между 0,854 и 0,867.
|