
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей Рассмотрим процедуру учета вза- r>ry\-, имных индуктивностей фаз. На рис. 1 показаны три фазы двигателя (Z,i, Li, l3), соединенные звездой (для простоты противо-ЭДС не показаны). Через Ml обозначена взаимная ин-ии дУивн?сГаз- ДУКТИвность коммутируемых фаз (L. БДПТ з), М - взаимные индуктивности коммутируемых фаз и фазы (La), образующей контуры с коммутируемыми фазами. Если записать для рассматриваемых контуров дифференциальные уравнения и перейти к дискретным аналогам, соответствующим неявному методу Эйлера, то получим следующие выражения для сопротивлений-аналогов индуктивностей: ?i,= (L,-Лf,)/Я; RL2{Li+2M~Mi)/H; Уравнения узловых потенциалов решаются методом Гаусса. Структурная схема программы. Программа состоит из трех блоков. В качестве исходных данных вводятся матрица инцинденций, параметры ветвей, ЭДС источника питания и противо-ЭДС фаз (последние могут быть введены в виде аналитических зависимостей или таблично), параметры машины (частота вращения, число фаз, число пар полюсов и т. п.). Во входном блоке осуществляется вычисление проводимостей ветвей, ЭДС ветвей на первом шаге, длительности межкоммутационного интервала и т. д., т. е. всех параметров, не изменяющихся от шага к шагу. Во втором (вычислительном) блоке осуществляется формирование уравнений узловых потенциалов, решение этих уравнений методом Гаусса, формирование данных, необходимых для вычисления следующего шага, и формирование выходных данных. Третий блок (переключений) осуществляет изменение состояния полупроводниковых ключей в соответствии с введенными в схему законами управления транзисторами и логикой переключения диодов. Этот блок построен в виде последовательности логических операций, осуществляемых на каждом шаге. Программа написана на языке ФОРТРАН и реализована на ОС ЕС 1033. Она позволяет рассчитывать процессы для различных схем БДПТ на межкоммутационном интервале. Длительности, счета зависит от слощнрсти схе- 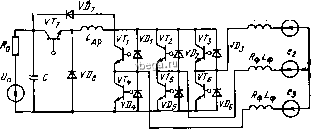 Рис. 2. Принципиальная электрическая схема БДПТ МЫ БДПТ, длительности межкоммутационного интервала (числа оборотов) и шага интегрирования. Пример использования программы. На рис. 2 приведена принципиальная схема одного из вариантов БДПТ. Машина имеет три фазы, соединенные звездой. Коммутатор (VTi ... У7б, VDi ... КОб) выполнен по схеме трехфазного моста. Транзистор VT? работает в релейном режиме, обеспечивая поддержание тока подключаемой фазы в определенном коридоре . На рис. 3 показан граф этой схемы. На графе перечеркнуты те ребра, в которых стоят полупроводниковые ключи, закрытые в исходном состоянии. Таким образом, матрицы Т и D имеют вид: г=(oolOlOl) z)=(oooiooio) Подробно назначение отдельных элементов и порядок переключения структур описаны в [3]. На рис. 4 показана кривая тока фазы, вычисленная с помощью описанной программы для следующих значений параметров: Rф= =0,06 Ом; £ф=0,08 мГн; £др=0,15 мГн; напряжение питания 27 В; номинальный фазный ток 20 А; величина токового коридора ±1 А; амплитуда противо-ЭДС для рассчитанной кривой 14,5 В. На рис. 5 приведена осцил- 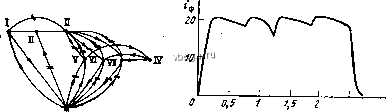 Рис. 3. Граф схемы БДПТ, приведенной на рис. 2 Рис. 4. Фазный ток двигателя на маж-коммутационном интервале рассчитанный на ЭВМ 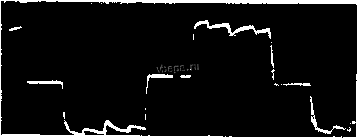 Рис. 5. Осциллограмма фазного тока, полученная на макете БДПТ лограмма, полученная на макете БДПТ с близкими параметрами. Из сравнения этих кривых можно сделать вывод о хорошей сходимости результатов. СПИСОК ЛИТЕРАТУРЫ 1. Ильин В. Н. Основы автоматизации схемотехнического проектирования.-М.: Энергия, 1979. 2. Соболев Л. Б. Цифровое моделирование процессов в импульсных источниках вторичного электропитания и бесколлекторных двигателях постоянного тока.-ЭТВА/ Под ред. Ю. И. Конева, -М.: Радио и связь, 1985, вып. 16, с, 186-191. 3. Розно Ю. Н., Соболев Л. Б, Исследование электрических процессов в бесколлекторном двигателе постоянного тока. - ЭТВА/ Под ред. Ю. И. Конева. -М.: Радно и связь, 1985, вып. 16, с. 191-211. УДК 621.314.6 Я. Г. Владимиров МОДЕЛИРОВАНИЕ НА ЭВМ ПРОЦЕССОВ В ПОЛУПРОВОДНИКОВОМ ПРЕОБРАЗОВАТЕЛЕ БДПТ Математическое моделирование с применением аналоговой ЭВМ является эффективным методом исследования динамических режимов БДПТ, особенно если они имеют сложную структуру. В [1] описана модель для исследования электромагнитных и электромеханических переходных процессов в БДПТ при пуске и регулировании частоты вращения. Настоящая статья посвящена исследованию динамического торможения в данной модели. В этот режим БДПТ обычно переводится при снятии управляющего сигнала. Для любого электродвигателя динамическое тормо-
|