
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей дополнительно решить задачи унификации источников вторичного электропитания и повышения надежности за счет использования части параллельно включенных стабилизаторов в качестве горячего резерва. Как показано в fl], параллельная работа импульсных стабилизаторов напряжения, включенных на общую нагрузку, возможна только при наличии специальных устройств, обеспечивающих выравнивание токов между работающими блоками (при одинаковой их мощности). Эти устройства содержат цепи отрицательной обратной связи по току S каждом из параллельно работающих стабилизаторов и требуют выключения измерительных резисторов в выходные цепи стабилизаторов, что увеличивает их выходные сопротивления и вызывает дополнительные потери. Ниже рассматривается схема параллельного включения стабилизаторов [2], в которой напряжения, пропорциональные токам нагрузки, снимаются с обмоток дросселей фильтров. Для определенности пред-лолагается, что каждый из параллельно работающих стабилизаторов выполнен по схеме импульсного регулятора с последовательным включением регулирующего ключа (рис. 1) и имеет компенсационно-параметрическую схему управления [3]. Регулировочная характеристика такого регулятора описывается выражением ив=икз-1вГ, где Um - напряжение на нагрузке; U - входное напряжение; ка - коэффициент заполнения; /н - ток нагрузки; г - выходное сопротивление регулятора. Схема управления стабилизатора (рис. 1) состоит из усилителя отрицательной обратной связи, выходное напряжение которого U подается на один из входов сумматора 2. На второй вход сумматора подается некоторое напряжение Д1/, пропорциональное разности выходного тока данного стабилизатора и работающего параллельно с ним. Выходное напряжение сумматора определяет порог срабатывания компаратора К- Второй вход К подключен к выходу генератора пилообразного напряжения, состоящего из конденсатора С и источника тока ИТ, управляемого входным напряжением. Последний преобразует входное напряжение U в пропорциональный ток UIR. Работа стабилизатора в установившемся режиме при непрерывном изменении тока дросселя сводится к следующему. Если регулирующий ключ РК выключен, то ток дросселя замыкается через диод VDi. При этом открыт диод VDi и напряжение на конденсаторе С фиксировано на нулевом уровне. Включение РК осуществляется сигналом, посту-лающим от задающего генератора ЗГ. При этом диоды VDi н VDt закрываются, а конденсатор С заряжается током UjR. В момент ра- -о УООС Рис. 1. Схема ключевого стабилизатора напряжения венства напряжений на входах компаратора на выходе последнего формируется сигнал выключения РК, после чего конденсатор С разряжается и все процессы повторяются. При п параллельно работающих одинаковых стабилизаторах для i-ro стабилизатора коэффициент заполнения определяется из соотношения k3i={Uo+m)CR/TU, (1) а выходное напряжение \ 4=1 Ток, отдаваемый в нагрузку i-м стабилизатором, очевидно, равен (икы-ия)1г или с учетом (1) и (2) Отсюда разность тока fe-ro стабилизатора н среднего тока 1ч=1ш!п, соответствующего равной загрузке всех стабилизаторов, определяется нз выражения Mi = ii~-h--[nht-y,hk\ (4) с учетом Aai, определенного из выражения (1), получим UqCR Tr At/, - At/, Для формирования напряжений AUi параллельно работающих стабилизаторов используется схема, приведенная на рис. 2. В ней 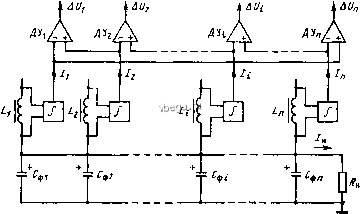 Рис. 2. Схема формирования сигналов рассогласования 9-5084 129 каждый интегратор выделяет среднее напряжение на дросселях фильтра hri, где tl - активное сопротивленне обмотки дросселя, являющееся составной частью выходного сопротивления г. Эти напряжения подаются иа входы дифференциальных усилителей ДУ, каждый из которых (при равных гь) выделяет разность At/= --ГьКцу (U-Ii+i), где (=1, 2..... rt-1, причем Д£/п = -ГьКду (/п-/i), э /СДУ - коэффициент усиления ДУ. Иными словами, входные цепи ДУ образуют замкнутое кольцо. Следователь- яо, 2 ft = 0 и выражение (5) приводится к виду 4=1 Учитывая значение Д[/; и полагая t = l, 2,..., л, получаем из (6) систему я уравнений относительно токов /л Решение этой системы для любого J дает значение /г=/ср и не зависит от коэффициента усиления дифференциального усилителя и входящих в выражение (6) параметров Uo, С, R, Т, г прн их равенстве. Следует, однако, отметить, что включенные на общую нагрузку стабилизаторы должны быть рассчитаны на один уровень выходного напряжения, а величина UoCR/T определяет этот уровень для идеального регулятора напряжения (без учета потерь). Поэтому в реальных условиях можно считать, что для всех параллельно включенных стабилизаторов UCRIT = const, а неизбежное различие в выходных уровнях напряжений компенсируется изменением значения къи определяемого из выражения (1). Можно показать, что если сопротивления Tl различны, то рассмотренное устройство работает так, что поддерживает постоянным значение hri. В этом случае при изменении общего тока нагрузки на величину Д/н приращение тока в t-м стабилизаторе определяется из соотношения cm; /I 4 J 2
0 2 4 6 1 Л Рис. 3. Зависимости распределения токов в трех параллельно включенных стабилизаторах где Г; -выходные сопротивления регуляторов соответствующих номеров. Это обусловливает возмож-1юсть включения на общую нагрузку стабилизаторов, рассчитанные на различные уровни выходной мощности. На рис. 3 приведены экспериментальные зависимости токов каждого из трех стабилизаторов, работающих на общую нагрузку, от суммарного тока нагрузки, подтверждающие сделанные выводы,
|