
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей синусоидальным напряжением, т. е. в большинстве случаев станет практически незначительным. Амплитуда импульса фазного тока становится независимой от частоты, так как она определяется только уровнями установки и регулирования токового коридора . Единственное, что останется неизменным, это требование к частоте ШИМ в соответствии с (5). Поэтому при малых значениях ух частотные потери в транзисторах преобразователя могут быть настолько значительными, что применение этих структур останется практически невозможным. Очевидно, что необходима такая структура силового преобразователя, в которой постоянная времени силовой цепи, при коммутации фаз сохранилась бы минимальной, а при формировании вершины импульса, т.е. при импульсном ограничении тока была бы значительно большей. Схема такого преобразователя изображена на рис. 4. Здесь транзисторы VTi ... VTe образуют трехфазный мостовой инвертор, осуществляющий только переключения фаз машины через каждые 60° электрического угла так, что в любой момент времени две фазы подключены к шинам моста, а одна отключена. Транзисторы VTj и VTs вместе с дросселем L являются импульсным регулятором тока, так как эта часть схемы охватывается обратной связью по току, потребляемому мостовым инвертором [6]. Принципиальное значение имеет диод VDg, который отпирается только при коммутации фаз машины из-за различной скорости изменения токов: нарастающего в подключаемой фазе и спадающего в дросселе. Поэтому коммутация фаз происходит при замкнутом накоротко дросселе, т. е. при полном напряжении питания на шинах моста и поэтому за минимальное время (9). По окончании коммутационного процесса диод VDg запирается и ши-ротно-импульсное регулирование (ограничение) фазного тока происходит при наличии дросселя, включенного по- 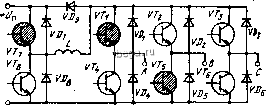 Рис. 4. Структура БДПТ с трехфазным инвертором и импульсным регулятором тока следовательно с обмотками якоря машины. Поэтому ве* личина ух силовой цепи, определяющая требуемую частоту ШИМ, согласно (5) может быть увеличена во много раз по сравнению с ух собственно обмоток машины. В результате необходимая частота ШИМ может быть в любом случае снижена до приемлемых значений. Например, используя беспазовую машину с РЗМ-ин-дуктором при 7=0,05, L=20 мкГн, R-0,5 Ом и применяя в регуляторе дроссель с Z, - 300 мкГн, /?др = = 0,5 Ом, получаем постоянную времени индуктивно-активной цепи Т2=320 мкс и у2=0,1. Теперь, полагая /С= = 0,9, требуемая частота ШИМ будет равна 12 кГц, что является вполне приемлемым при современном состоянии элементной базы. Длительность коммутационных процессов согласно. (9) не будет превышать 4 мкс. Полоса пропускания регулятора БДПТ на уровне 0,7 получается равной 500 Гц (/пр= 1/2X2), что также превышает все возможные требования. Эта структура силового преобразователя может быть использована для управления любой машиной, но становится единственно приемлемой по мере уменьшения ух машины. Результаты цифрового моделирования процессов в такой структуре БДПТ изложены в [8]. На основании изложенного следует считать целесообразным следующий подход к определению структуры силовой части БДПТ. Эффективное электромеханическое преобразование в машине требует создания рациональных форм фазного тока. Энергетическая эффективность силового преобразователя достигается только при импульсном регулировании тока в фазах машины. Дополнительные потери, возникающие при импульсном регулировании, с повышением частоты ШИМ в машине уменьшаются, а в преобразователе увеличиваются (после некоторого спада на низких частотах ШИМ). При заданных дополнительных потерях в машине необходимая частота ШИМ определяется обобщенным параметром машины yx=IL/Un. По совокупности требуемой для машины частоты ШИМ и частотных потерь в преобразователе определяется структура силовой части БДПТ. Для электромеханического преобразования энергии в системе БДПТ в принципе пригодна любая (обычно трехфазная) электрическая машина, тип и параметры которой определяются совокупностью массо-объемных, энергетических, технологических и экономических требований. Параметры и характеристики машины определяют предельные возможности электромеханического преобразования, кко- торым в системе БДПТ можно только приблизиться в Меру свойств силового преобразователя. Каковы будут процессы в машине, что останется от ее абсолютных и удельных параметров в системе БДПТ, - полностью определится преобразователем. И машина, и преобразователь в данном случае являются лишь элементами, в отдельности не дающими никакого конечного результата. Каковы будут свойства системы, - определится как машиной, так и преобразователем в равной мере. СПИСОК ЛИТЕРАТУРЫ 1. Конев Ю. И. Транзисторные импульсные устройства управления электродвигателями и электромагнитными механизмами. - М.: Энергия, 1964.-120 с. 2. Дубенский А. А. Бесконтактные двигатели постоянного тока. - М.: Энергия, 1967,-144 с. 3. Балагуров В. А., Гридин В. М., Лозенко В. К- Бесконтактные двигатели постоянного тока с постоянными магнитами.-М.: Энергия, 1975.-128 с. 4. Конев Ю. И., Машуков е. В., Розно Ю. Н. О возможностях миниатюризации бесколлекторных электродвигателей. ~ ЭТВА/ Под ред. Ю. И. Конева. -М.: Сов. радио, 1976, вып. 8, с. 3-12. 5. Бесколлекториый электродвигатель с интегрально-гибридным инвертором/ Ю. И. Розно, Е. В. Машуков, Б. А. Кульечев, О. С. Овсянников-ЭТВА/ Под ред. Ю. И. Конева. -М.: Сов. радио, 1977. вып. 9, с. 7-18. 6. Федоров В. В. Бесконтактный двигатель постоянного тока с регулируемым торможением. - ЭТВА/ Под ред. Ю. И. Конева. - М.: Сов. радно, 1978, вып. 10, с. 191-197. 7. Овчинников И. е., Лебедев Н. И. Бесконтактные двигатели постоянного тока.- Л.: Наука, 1979.-270 с. 8. Розно Ю. Н., Соболев Л. Б. Исследование электрических процессов в бесколлекторном двигателе постоянного тока. - ЭТВА/ Под ред. Ю. И. Конева-М.: Радио и связь, 1985, вып. 16, с 191-211. УДК 621.313.292 Ю. Н. Розно, Т. В. Вашакидзе ФАЗОВЫЕ СООТНОШЕНИЯ В ПОЛУПРОВОДНИКОВОМ ПРЕОБРАЗОВАТЕЛЕ БДПТ С ИМПУЛЬСНЫМ РЕГУЛЯТОРОМ ТОКА В структуре бесколлекторного двигателя постоянного тока с мостовым инвертором и внешним регулятором тока (рис. 1) реализуются электрические процессы, способствующие наиболее быстрому нарастанию и спаду тока фазы в импульсе на частоте вращения, что позволяет получить минимальный фазовый сдвиг между током фазы и
|