
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей - С/по-const, Ын=Ин.зад и uy p{t) при отклонении от установийШёгося режима работы при модуляции спада импульса; рисунка видно, что. dt dt где А/ -приращение длительности импульса, обусловленное отклонением Аыупр; dui,ldt= Um/T. При t=k3oT-0 0=l, Щ=ипо, Ии=Ин.зад- du\ p/dt=K {ub.3iji.- Uno). С учетом Ma=t/T получаем дифференциальный коэффи-диент передачи ШИМ 9Лз Д*з } /54 Отличие от выражения, полученного в [1], определяется вторым слагаемым знаменателя, отражающим влияние пульсации выходного напряжения Ин с частотой ШИМ. Оно вызывает уменьшение дифференциального коэффициента передачи ШИМ при увеличении Uno, уменьшая тем самым параметрическое возмущение, вызванное изменением U o, так как коэффициент передачи силового ключа du/do=U o увеличивается при увеличении Uno-Общий коэффициент передачи приведенной линейной непрерывной части (ПЛНЧ) линеаризованной разомкнутой импульсной системы Из условня компенсации параметрического возмущения /(н=const при любых Uno получаем [/т = Г/( [ н.зад-Ь(1 Сн-1)г/по]. (6) Весьма интересен частный случай /Сн=1, в котором параметрическая инвариантность системы обеспечивается при неизменном значении Um за счет влияния пульсации Ыи с частотой ШИМ на коэффициент передачи ШИМ. При этом передаточная функция ПЛНЧ Wn{s)=KJs=l/s, а передаточная функция разомкнутой импульсной системы Kp{z, e)=z/(z-1). Знаменатель передаточной функции замкнутой системы имеет вид l+2-i/Cp(z,l-0)=z/(z-l), следовательно, замкнутая система имеет нулевой плюс, что соответствует границе между апериодическими и колеба- тельными процессами. При этом переходные процессы на ступенчатое возмущение в такой системе заканчиваются за один период квантования, что является предельным быстродействием импульсной системы. Как видно из (6), при Кп=1 Um=TKUn.,s, (7), - и н.зад- При KJ<.t<T 0=0, Иф=0, Ии = Ин.зад и dUy p/dt= Кии .зац. Таким образом, в этом случае duyup°ldt=dunvinldt при кзТ<(<Т, следовательно сигнал Ыупр(0 совпадает с сигналом Ыпил(0 при кзТ<1<Т (рис.4). Это делает неопределенным состояние релейного звена компаратора на этом интервале времени, а при сколь угодно малых отклонениях параметров от расчетных может привести к возникновению в идеализированной модели скользящего режима (в реальной-автоколебаний с частотой, большей частоты ШИМ). Ввиду недопустимости последнего необходимо принять меры, обеспечивающие отсутствие дополнительных переключений компаратора на указанном интервале времени (например, введением самоблокировки состояния логиче* ского нуля). Рассмотрим процессы при произвольном изменении напряжения питания (кривая Иупр(0 на рис. 4). При этом упр {КТ) = лил (3) - UmK\ *з аар{кт=и+ J -d/Ки J к.з.д-ад. С учетом (7) получаем j /п(0= н.зад. О что совпадает с (4) и свидетельствует о достижении в рассматриваемом случае абсолютной инвариантности среднего значения выходного напряжения при произвольном изменении напряжения питания. В первоначальном случае как параметрическая, так и координатная инвариантности системы обеспечивались соответствующими цепями компенсации возмущений <см. рис. 1). В рассматриваемом случае параметрическая 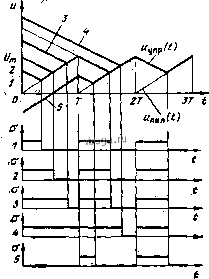 Рис. 5. Переходные процессы при различных начальных значениях Иупр(О) инвариантность обеспечена использованием влияния пульсации выходного напряжения с частотой ШИМ на дифференциальный коэффициент передачи ШИМ. Координатная инвариантность обусловлена совпадением сигналов Иупр(0 и пил (О во время паузы при,выборе параметров системы в соответствии с (7). Это ведет к тому, что значения Иупр с момента начала импульсов не зависят от напряжения питания и равны Um. Следствием является отсутствие переходного процесса при изменении Un, т. е. координатная инвариантность по отношению к Естественно, что при первоначальной подаче напряжения питания на рассматриваем,ый стабилизатор будут иметь место отклонения среднего значения выходного напряжения от заданного до затухания собственных составляющих переходного процесса. На рис. 5 показаны возможные варианты переходных процессов при различ ных начальных значениях Ыупр(0) и неизменном C/n=const. Прн ОИупр(О) <С/т переходные процессы заканчиваются за один период квантования (вариант 1), причем на первом периоде квантования среднее значение напряжения на входе силового фильтра Иф меньше заданного. При {7то< упр(0ХС/тп/ин.зад переходные процессы также заканчиваются за один период (вариант 3), но среднее значение Ыф на первом периоде больше заданного. При Uy p(0) = Um сразу же начинается установившийся режим работы, без переходного процесса (вариант 2). При Uy p{0)>UmU IUa.33A переходные процессы занимают более одного периода квантования, причем на первых периодах з = 1 (вариант 4). При Ыупр(0)<0 переходные процессы также занимают более одного периода, на первых периодах з=0 (вариант 5). Это позволяет обеспечить выбором начального значения пилообразного напря-
|