
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей  Рис. 1. Типовая структурная схема импульсного стабилизатора напряжения: Un - напряжение питания; СК-силовой ключ; ф - напряжение, поступающее на силовой фильтр Ф; tn - ток нагрузки; Ub - напряжение на нагрузке, являющееся управляемой переменной; Ын.зад - заданное значение u; е - отклонение управляемой переменной от заданного значения; ПКУ - последовательное корректирующее устройство с передаточной функцией Wa{s); ШИМ - широтно-импульсный модулятор, формирующий сигнал управления силовым ключом в о коэффициентом заполнения кз {0=0 соответствует разомкнутому состоянию ключа, 0= 1 - замкнутому; Иупр - напряжение, управляющее ШИМ (обычно кз линейно зависит от Иупр); КУ - компенсирующее устройство; Uk - напряжение компенсации координатного возмущения; Un - амплитуда пилообразного напряжения, изменение которой обеспечивает компенсацию параметрического возмущения частотой ШИМ на работу ШИМ. Соответствующая структурная схема изображена на рис. 1. Рассмотренные в [1] условия компенсации координатного и параметрического возмущений получены для квазистатического режима работы и обеспечивают абсолютную статическую инвариантность среднего значения выходного напряжения и параметрическую инвариантность системы для малых отклонений от статического режима при изменении напряжения питания U . Эти условия для понижающего импульсного стабилизатора имеют вид Um=(\l\K\)Un, Ык = н.зад (= const, (1) где К - требуемое значение дифференциального коэффициента передачи участка прямой цепи, включающего в свой состав ШИМ, силовой ключ и фильтр Ф. Каналы возмущения Un и компенсации соединяются на силовом ключе, причем первый канал - безынерционный, а в состав второго входит единственное инерционное звено - ШИМ. Поэтому в рамках эквивалентной непрерывной модели сохраняется как координатная, так и параметрическая инвариантность системы при произвольном медленном (по сравнению с периодом квантования) изменении напряжения питания, когда относительное его изме- нение на периоде квантования мало. Более того, при модуляции спада импульса сохраняется инвариантность системы при произвольном (в том числе скачкообразном) изменении и во время паузы. При модуляции фронта импульса это свойство сохраняется в случае формирования пилообразного напряжения в виде Uii {t)- Um{U )t/T, где Г -период повторения импульсов; Um{Un) - зависимость амплитуды пилообразного напряжения от напряжения питания в соответствии с (1). Пусть для понижающего стабилизатора с модуляцией спада импульса пилообразное напряжение формируется в виде j U:{i) = щ:fUA-)d.. 0<tT. (2) к= н.зад/1к1. (3) что соответствует (1) при f7n=const. При этом момент окончания импульса kT определяется из условия ищл{ЛзТ)-ик, откуда с учетом (2) и (3) имеем 1 t/ ()ix=: .3 . (4) При сделанных ранее допущениях (UAt) при 0<<Д:зГ; О при kJ<t<CT; Ср - ф.ср-- С учетом (4) ы11ср= н.зад, т. е. в этом случае обеспечивается абсолютная инвариантность среднего значения выходного напряжения при произвольном изменении напряжения питания. Напомним, что результаты в [1] и все изложенное выше получено при условии малости составляющей входного напряжения ШИМ Ыупр, обусловленной пульсацией выходного напряжения Ин с частотой ШИМ. Это требует существенного разнесения частот квантования и среза (соср-Ссок), что сужает полосу частот возмущений, подавляемых замкнутым контуром, и снижает быстродействие I 1<лил \ РЗ Рис. 2. Идеализированная модель контура управления с заменой непрерывной части интегрирующим звеном ПО сравнению с предельно возможным при выбранной частоте квантования. Проведем анализ влияния пульсации выходного напряжения Ин с частотой ШИМ на условия компенсации возмущений, вызванных изменением напряжения питания, для понижающего преобразователя. Будем полагать, что асимптотическая логарифмическая амплитудная характеристика (ЛАХ) непрерывной части разомкнутой системы сохраняет наклон - 20 дБ/декада в области частот cocp<to<com, где (Urnoik (это трсбование уточняется в дальнейшем). Это позволяет использовать для анализа идеализированную модель с заменой непрерывной части интегрирующим звеном ИЗ (рис. 2). Компаратор, входящий в состав ШИМ, представлен в виде сигналов Иупр и Иинл и релейного звена РЗ. На рис. 3 показаны сигналы Umi {t), Uyapit), соответствующие установившемуся режиму работы при U = и 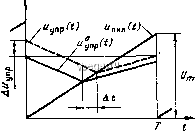 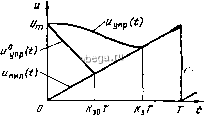 Рис. 3. Временные диаграммы Рис. 4. Момент совпадения сиг- пилообразного напряжения, сигнэ ла управления и шнротно-моду-лированного управляющего напряжения нала управления с пилообразным напряжением
|
||||||||||||||||