
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей Таким образом, прямоугольная форма тока - импульс тока с длительностью, которой соответствует электрический угол 120°, является весьма рациональной для организации процесса электромеханического преобразования энергии. В то же время для получения такой формы тока используются достаточно простые дискретные датчики положения ротора и импульсный ограничитель тока на регулируемом уровне. Очевидно, что для питания фаз двигателя переменным током прямоугольной формы с длительностью импульсов, соответствующей электрическому углу 120°, необходима такая структура преобразователя и такой режим управления им, чтобы эти импульсы тока чередовались с разрывами цепей фаз через электрический угол 60°. Основные функциональные требования к силовому преобразователю заключаются в том, что он должен обеспечить формирование и регулирование огибающей фазного тока (переменного) на частоте вращения и осуществить эти процессы в режиме щиротно-импульсного регулирования при допустимо малых дополнительных потерях в сопротивлениях фаз R. Первое требование наилучшим образом выполняется при индуктивности фаз L, близкой к нулю (точнее, при t=L ?->-0), второе -при значительной индуктивности фаз (точнее, при значительной т), так как это позволяет уменьшить частоту ШИМ. Поскольку любая машина имеет вполне определенную постоянную времени обмоток якоря, указанное противоречие можно разрешить только путем соответствующего выбора структуры и режимов работы силового преобразователя. По существу эта задача является типовой для всех усилителей с широтно-импульсной модуляцией: получить максимальную (или заданную) полосу пропускания усилителя при минимальной частоте ШИМ и ограничении по коэффициенту гармоник. Особенность нагрузки в данном случае состоит в том, что она в дополнение к элементам L/? содержит переменную во времени противо-ЭДС Е. Оценка свойств силового преобразователя БДПТ на основе теории усилительных устройств позволяет в общем виде определить основные соотношения в системе преобразователь - машина. Все усилители, работающие в режиме переключений, при безразрывном токе нагрузки имеют очень низкое выходное сопротивление, равное сумме выходного сопротивления насыщенных транзисторов и внутреннего сопротивления источника питания. Такие усилители создают на на- . грузке напряжение, величина и форма которого приблизительно пропорциональны величине и форме напряжения сигнала. Величина и форма тока в нагрузке зависит от величины и частоты выходного напряжения усилителя и свойств нагрузки. Это значит, что заданные формы фазного тока в данном случае не могут быть обеспечены, что явля- efcn невыполнением требований эффективного электромеханического преобразования энергии. Однако механические характеристики машины при таком управлении могут быть достаточно жесткими. Для получения заданной формы тока в обмотках якоря необходимо, чтобы выходная цепь усилителя обладала свойствами источника тока, т. е. выходное сопротивление усилителя было во много раз больше любого сопротивления нагрузки во всем необходимом диапазоне частот. Такие свойства усилителя можно получить, охватив его отрицательной обратной связью по току (например, по принципу токового коридора ). Теперь могут быть обеспечены условия эффективного электромеханического преобразования энергии, но механические характеристики машины станут моментными. Для любого двигателя регулирование тока означает регулирование момента. Особенность БДПТ заключается в том, что если даже не производится регулирование общего потребляемого тока, оно получается неизбежно как результат формирования н регулирования тока фаз. Если в системе БДПТ необходимо иметь высокую жесткость механических характеристик при эффективном электромеханическом преобразовании энергии, то необходим усилитель с высоким выходным сопротивлением, а систему в целом надо охватить отрицательной обратной связью по частоте вращения вала машины. После введения такой обратной связи форма фазного тока будет по-прежнему определяться усилителем, а значение - моментом на валу машины, чем и обеспечивается жесткость механических характеристик. Заметим, что применение любых обратных связей не может изменить предельные энергетические возможности системы преобразователь - машина, так как они определяются напряжением питания, сопротивлением обмоток якоря, максимально допустимым током транзисторных ключей. Наибольшее практическое значение имеют две формы тока в обмотках якоря: приблизительно синусоидальная и приблизительно прямоугольная с длительностью импульса, соответствующей электрическому углу 120°. Во всех случаях форма тока оценивается по огибающей, так как некоторые пульсации тока при импульсном регулировании неизбежны. Наиболее универсальной является структура БДПТ с трехфазной (или даже двухфазной) машиной, каждая секция которой питается от отдельного однофазного инвертора регулируемым напряжением или током, заданной формы (рис. 2). Такая структура позволяет получать различные формы фазного тока и осуществлять любые необходимые законы управления машиной. В этой структуре обеспечивается минимум статических потерь в силовых транзисторах, так как суммарный потребляемый ток де- Рис. 2. Структура БДПТ с трехфазной машиной, питаемой от трех однофазных преобразователей. Диоды и блокирующие транзисторы для упрощения схемы не показаны лится на три фазы и половина общего числа силовых транзисторов одновременно проводит ток. Второй важнейшей структурой БДПТ является машина со связанными в звезду фазами, питаемая от одного трехфазного инвертора (рис. 3). В обеих структурах необходимая при импульсном регулировании тока индуктивность нагрузки является только индуктивностью обмоток якоря. Этим определяется требование к частоте ШИМ, необходимой для получения приемлемого значения дополнительных потерь в меди из-за пульсаций тока. При однополярных импульсах напряжения на частоте ШИМ (первый импульсный режим согласно [1]) мощность, рассеиваемая в активном сопротивлении R индуктивно-активной нагрузки, определяется при линейных пульсациях тока из следующего выражения: Рр=1шЯ1кэ + к,Ц1-к,)Г112хЦ, (1) где 13= Уи/Г - коэффициент заполнения; /m=tn ?-мак- 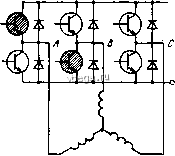 Рис. 3. Структура БДПТ с трехфазной машиной, питаемой от одного трехфазного преобразователя
|
|||||||||||||||||