
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей щих с частотой соо контура за период коммутации Т. Последнее допустимо, поскольку круговая частота коммутации и резонансная частота соо, как правило, сильно разнесены (не менее 15). В данном случае выход НЧ только один (выходное напряжение импульсного регулятора), поэтому матрица-строка у является скалярной величиной, а матрица связи Ci - строкой: Ci = [1 0]. Преобразующая матрица Кэ и обратная ей матрица К-э определяются из матриц e*=e* известными способами. В результате получим матрицы р и и в виде Р - [Y 0] М, ( ) Кз = Y (I - аК) [Аэ -1 /7,3-1]; vA Pi3> Ргъ - элементы матрицы Mg (корни характеристического уравнения рЕ - е* пе*и - 0): /Рэ = 1 - -\- j%Jo: р = 1 -аТ - /созГоз; ш з = со ( 1 -k); Перемножив соответствующие компоненты p и u, согласно (13) получим передаточную функцию W{z), к которой применим билинейное преобразование и перейдем к псевдочастоте v. В результате для инвертирующей схемы получим характеристику разомкнутой импульсной системы 2/-з&з+1 - -) +2/-з+1 W{iv)=-Ж- \ /Л ь)оэ J /ifi\ Отметим характерные особенности полученного результата: резонансная частота сооэ и коэффициент затухания э эквивалентного фильтра зависят от коэффициента заполнения; в числителе два неминимально-фазовых звена, постоянная времени одного из них зависит от отношения /ЯнЦэ/аюзЬ/Яп), а вторая равна Т/2; коэффициент передачи на частотах, близких к нулю, обратно пропорционален (1-з); высокочастотная асимптома ПЛАХ, соответствующая (16), является горизонтальной. Повышающая схема. Для данной схемы матрицы Ai и Аг такие же, как и в предыдущем случае, а матрицы входного воздействия Bi= В2= [О f/Bx/L]. Исходным соотношением для получения частотной характеристики остается формула (13). После преобразований, аналогичных проведенным для инвертирующей схемы, получим частотную характеристику в виде / т \ I Т \ I V \ I ч \ V +2/-1,4-1 (17) где сооэ и э определяются из соотношений для инвертирующей схемы. Из сравнения (16) и (17) можно видеть, что частотные характеристики двух последних схем близки по своим свойствам. На рис. 2 приведены экспериментальные частотные характеристики повышающей схемы, имеющей следующие параметры: t/Bx=10 В; L=4,8-10-3 Гн; С=136 мкФ; /=8,6 кГц. Характеристики снимались при трех значениях К : 0,25; 0,5; 0,75. 1,АВ го 16 п в о -4 -5 -12 -16 -20
Рис. 2. Экспериментальные логарифмические частотные характеристики повышающей схемы Из рис. 2 следует определяющее влияние низкочастотного иеми-нимально-фазового звена с постоянной вре1мени 2§э/еооэ: фазовый угол достигает -180° при весьма небольшом значении коэффициента усиления, что не позволяет создать замкнутую систему с удовлетворительными динамическими свойствами. Последний вывод показан методом усреднения в [2, 3]. Необходимо отметить различие между излагаемым здесь методам и методом усреднения. В данном методе система рассматривается как дискретная, что позволяет учесть существенные особенности устойчивости и переходных процессов (что наиболее важно при близких частотах среза и квантования), В усредненной модели нельзя учесть изменения коэффициента передачи и выявить особенности поведения системы, связанные с квантованием сигнала по времени. Усредненный метод является методом квазинепрерывным, а нз этого следуют его недостатки в определении динамических свойств. Рассмотрим возможности улучшения свойств структур с переменными параметрами. Дополнительные связи в системах с переменной структурой. Низкочастотное неминимально-фазовое звено в характеристике W{jv) инвертирующей и повышающей схем, как уже говорилось, создает трудности при создании замкнутой системы. Использование последовательной коррекции и одноконтурной систе1мы регулирования связано со снижением частоты среза и, следовательно, с потерей быстродействия. Другой путь - применение дополнительных связей, в которых используются сигналы переменных состояния. На рис. 3 и 4 показаны схемы импульсных стабилизаторов напряжения на основе инвертирующей и повышающей схем. В каждой из них применяется дополнительный контур управления, использующий сигнал по току дросселя (сигнал с резистора т) или по току конденсатора (сигнал с резистора Rc)- Рассмотрим влияние каждого из этих сигналов на формирование частотной характеристики устройства. Положим сопротивления Rt. и Rc достаточно малыми, что позволит пренебречь их влиянием на процессы в сн- 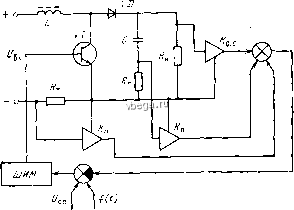 Рис. 3. Схема импульсного стабилизатора напряжения на основе инвертирующей схемы с дополнительными контурами управления
|