
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Структуры полупроводниковых преобразователей структуры полупроводниковых преобразователей Бесконтактный (или бесколлекторный) электродвигатель постоянного тока (БДПТ) представляет собой систему электромеханического преобразования энергии, состоящую из синхронной электрической машины п силового электронного преобразователя (инвертора), связанных через датчик положения ротора (ДПР) так, что частота переменного напряжения инвертора равна или кратна частоте вращения ротора маилины. Датчик положения ротора, механически связанный с ротором машины, осуществляет в системе позиционную обратную связь от ротора к инвертору, в простейшем случае аналогичную функциям коллектора в машинах постоянного тока. Такие системы с инверторами на основе неполностью управляемых (ионных) приборов впервые были созданы в 1933 г. и обычно называются вентильными двигателями (ВД). С появлением тиристоров БД получили широкое распространение в промышленных электроприводах мощностью в десятки- сотни киловатт. Вентильные двигатели с силовыми преобразователями на транзисторах (или БДПТ) развиваются с 50-х годов, по в основном в диапазоне микромощностей: от долей ватта до десятков ватт. Они отличаются предельно простыми схемами преобразователей, низким КПД как машин, так и систем в целом. С этими недостатками приходится мириться ради основного преимущества - бесконтактности. Недостатки современн~ых БДПТ и ограниченные области их применения в значительной мере объясняются распространенным методом подхода к их проектированию не как системы, а как электрической машины, т. е. недооценкой роли преобразователя в этой системе и его взаимосвязи с машиной. Обычно машина проектируется и изготовляется на наивысшем современном уровне, а преобразователь рассматривается как некоторое дополнение к машине, которое должно быть по возможности простым. Это нашло отражение даже-в терминологии, и силовой преобразователь обычно называют коммутатором, хотя прежде всего он является инвертором и как правило регулируемым. Современные транзисторы позволяют создавать весьма эффективные преобразователи для БДПТ мощностью в сотни ватт - несколько киловатт. Бесконтактные регулируемые электроприводы такой мощности необходимы для робототехнических систем, высокооборотного инструмента и многих других целей. К таким приводам предъявляются требования не только отсутствия контактов, но и высокой удельной мощности. Эти требования в наилучшей степени выполнимы на основе БДПТ, так как именно в этой структуре возможно наиболее эффективное использование возможностей микроэлектроники и редкоземельных магнитных материалов. Высокая удельная мощность БДПТ может быть получена только при оптимальных энергетических соотношениях в системе, состоящей из силового преобразователя и электрической машины. Удельная мощность БДПТ максимальна при некотором оптимальном и достаточно высоком КПД этой системы. Последующее обеспечение интенсивного теп-лоотвода от машины и силового преобразователя означает включение в систему БДПТ (при определенной ее удельной мощности) всех устройств, необходимых для осуществления этого теплоотвода. Значительно важнее и полезнее использовать методы повышения удельной мощности машины и силового преобразователя при стандартных условиях теплоотвода, оставляя интенсификацию этих условий как дополнительное средство, которым можно воспользоваться в некоторых случаях с учетом реальных условий проектирования и эксплуатации БДПТ. Создание БДПТ с высокой удельной мощностью основано на совместном решении трех взаимосвязанных задач: обеспечении высокой удельной мощности силового преобразователя, электрической машины и организации эффективного взаимодействия преобразователя с машиной. Высокая удельная мощность преобразователя обеспечивается применением силовых транзисторов с достаточно малым выходным сопротивлением, уменьшением потерь в цепях управления, оптимизацией статического и динамического режимов транзисторов и частоты ШИМ, гибридной технологией. Высокая удельная мощность машины обеспечивается рациональным использованием свойств редкоземельных магнитных материалов (РЗМ). Взаимодействие преобразователя с машиной в первую очередь основано на создании в обмотках якоря необходимых форм тока, чем определяются требования к структуре преобразователя и процессам в нем. 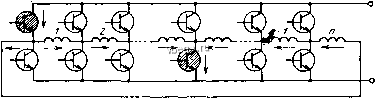 Рис. 1. Структура БДПТ с замкнутой многофазной обмоткой. Диоды для упрощения схемы не показаны Все важнейшие характеристики БДПТ определяются формой тока фаз якоря. Известно, что для получения максимального момента при постоянстве потерь в меди форма тока должна соответствовать форме противо-ЭДС секции. При этом обеспечивается максимальный электромагнитный момент и коэффициент использования двигателя. Одним из способов приближения коэффициента использования машины к единице является увеличение числа секций якоря. Это требование реализуется, например, в БДПТ с замкнутой обмоткой (рис. 1). Такая структура требует по два силовых транзисторных ключа иа каждую секцию, но одновременно проводят полный ток машины только два ключа из всех. Каждый силовой транзистор должен быть (вместе с цепями управления) рассчитан на полный ток машины, что увеличивает установленную мощность транзисторов, стоимость, массу и объем инвертора. Подобные структуры являются по существу бесконтактным аналогом коллекторных машин, в которых вместо каждой ламели коллектора нужно использовать два силовых транзистора, что совершенно неприемлемо по стоимости, массе, объему (даже с учетом достижений микроэлектроники). Поэтому обычно ограничиваются тремя секциями машины, трехфазным инвертором, содержащим шесть силовых ключей с соответствующими цепями управления. Для регулирования частоты вращения изменяют длительность включейного состояния секции, что приводит к уменьшению электромагнитного КПД машины. Процессы в БДПТ с трехфазными инверторами напряжения подробно рассмотрены в [2, 3, 7]. Противо-ЭДС обычно имеет форму от синусоидальной до приблизительно трапецеидальной, но всегда плавную. Для создания таких форм тока требуется применение аналогового датчика положения и преобразователя, работающего в режиме усиления постоянного тока или в режиме переключений. В первом случае преобразователь будет иметь низкий КПД, во втором - значительно лучше энергетические показатели, но при высокой частоте переключений силовых транзисторов потребуется тщательная организация процессов переключения для предотвращения сквозных токов и уменьшения частотных потерь в транзисторах. Известно, что достаточно хорошее использование машины получается при взаимодействии синусоидальной противо-ЭДС с током прямоугольной формы при оптимальной длительности импульса тока, соответствующей электрическому углу 133°. Прн этом электромагнитный момент при неизменных потерях в меди всего на 4% меньше, чем при соответствии форм тока и противо-ЭДС. Известно также, что лри уменьшении длительности прямоугольного импульса тока (или уменьшении электрического угла до 120°) обеспечивается меньший электромагнитный момент (только на 4,7%), чем при одинаковых (синусои-даденых) формах тока и противо-ЭДС,
|