
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Каждому настроечному параметру Y поочередно дается конечное приращение ДУ, определяется вызванное им приращение AjJ и-находится отношение этих приращений согласно (14-6). Этот метод представляет интерес в случае инерционных объектов, когда остальные методы могут дать большую амплитуду колебаний относительно максимума. Метод запоминания экстремума состоит в следующем. С помощью детерминированных или случайных поисковых сигналов изменяется настройка системы и каждый раз определяется текущее значение /. В запоминающем устройстве удерживается наибольшее (при поиске максимума) из полученных значений /. Направление движения к экстремуму определяется по разности А/ текущего и наибольшего значений /. Частные производные dJ/dYi определяются отношением конечных приращений Д ДУ, где приращение Д/, соответствующее приращению настроечного параметра AY, выделяется из полного приращения Д/ одним из рассмотренных выше методов путем частотного или временного разделения составляющих. В установившемся режиме существуют колебания относительно найденного экстремума с контролем его путем сравнения текущих значений / в окрестностях экстремума с экстремальным значением. § 14-4. ОСОБЕННОСТИ ИССЛЕДОВАНИЯ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Общий порядок и методы математического описания и исследования самонастраивающихся САУ те же, что и неадаптивных САУ. Некоторые особенности динамики, а отсюда и методов исследования самонастраивающихся САУ определяются нал}ичием в этих системах контура самонастройки. Общие требования, предъявляемые к этому контуру, те же, что и у основной САУ, т. е. это требования прежде всего в отношении точности, устойчивости и качества переходных процессов. Точность самонастройки в случае системы со стабилиза-дией критерия качества управления / определяется, как и обычной системе стабилизации, величиной отклонения этого критерия от его заданного значения. В самонастраивающихся САУ с оптимизацией / путем поиска экстремума в установившемся режиме имеют место поисковые колебания настраиваемых параметров Y относительно их значений, соответствующих экстремуму/. Поэтому точность самонастройки таких систем оценивается средней величиной отклонения / от его экстремального значения в установившемся режиме. Эта величина называется потерей на п о;и с к. Ее монно выразить через величину колебания относительно экстремума и крутизну экстремума: дуЦ in, (14-7) где AYxu - среднее значение квадрата установившегося отклонения У{п от значения, соответствующего J. Выражение (14-7) получается путем разложения разности / - в ряд Тейлора и удержания первых отличных от нуля членов ряда наименьшей степени малости. Этими членами являются члены с квадратом приращения, так как в точке экстремум первые производные dJfdY, образующие члены первой степени малости, равны нулю. . . При оценке точности основной САУ необходимо учитывать, в числе установившихся возмущений пробнь1е и поисковые оигналы со стороны системы самонастройки. Устойчивость процесса самонастройки это устой-. чивость удержания заданного или экстремального значения J.. В последнем случае для поисковой системы это .означает устойчивость автоколебаний относительно точки экстремума. Канество переходных процессов самонастройки определяется прежде всего быстродействием. В случае систем с оптимизацией настройки это быстродействие определяется временем поиска экстремума. Как уже .говорилось, в отношении быстродействия к контуру самонастройки предъявляются следующие требования. В случае САУ с самонастройкой коррекции (путем ее стабилизации или оптимизации) для обеспечения достаточной точности определения / быстродействие контура самонастройки должно быть на порядок меньше быстродействия основной САУ. Допустимый- нижний предел быстродействия при этом определяется быстротой изменения тех свойств основной САУ, которые стабилизируются или оптимизируются системой самонастройки. В частном случае системы экстремального регулирования, где оптимизируется статический режим объекта, быстродействие самонастройки сверху не ограничено, и поэтому целесообразно иметь его как можно ббльшим, так как нри этом объект будет работать в более оптимальном режиме. С точки зрения выбора методов исследования самонастраивающиеся САУ представляют собой многомерные много-к он т у р н ые системы связанного управления ве.чичинами X и J. В простейшем случае при одной выходной и одной настроечной величинах такие системы сводятся к двум контурам - контуру основной системы управления ведачиной X и контуру .самонастройки, осуществляющему управ.чение величиной /. Это иллюстрируется рис. 14-13. Здесь / -контур основной САУ, - контур самонастройки, 1 - часть основной САУ, входящая в оба контура, 23- остальные части соответственно основного контура и контура самонастройки. В общем .случае, как 12* 347 Рис. 14-13. Контуры сатио-наед-раивающейся САУ. .говоралось выше, самонастраивающаяся САУ может иметь иерархическую структуру, содержащую произвольное число друг с другом сцепленных контуров многоступенчатой автоматической настройки. Самонастраивающиеся САУ в общем случае являются нестационарными и нелинейными системами. Нестационарность вызвана теми изменениями во времени свойств основной САУ, корректировка которых и является целью само-настройки.- Нелинейность существует прежде всего ия-за наличия связи через контур самонастройки параметров У, основной системы с ее выходными величинами Х,. Таким образом, исследование самонастраивающихся САУ должно осуществляться методами исследования нелинейных систем, изложенными во второй части книги. При этом следует учитывать особенности исследования многомерных и нестационарных САУ, изложенные в § 7-6, пп. Б и В. В частности, задача существенно упрощается, если можно рассматривать контуры основной САУ и самонастройки как квазиавтономные и квазистационарные. Как показано в § 7-6, кваэиавтономность будет иметь место, если эти контуры резко различны по быстродействию. В самонастраивающихся САУ это часто возможно, когда быстродействие основного контура много больше быстродействия самонастройки. В этом случае при рассмотрении динамики основной САУ можно принимать ее настройку неизменной, т. е. считать У = Yo = const. Соответственно при рассмотрении процессов самонастройки можно пренебречь инерционностью основной САУ, полагая, что / определяется мгновенными значениями настроечных параметров У, т. е. является их статической функцией. Система самонастройки при этом будет квазистационарной, т. е. динамика изменения уставок Yio будет описываться уравнениями с постоянными во времени коэффициентами, если пренебречь поисковыми сигналами У в силу их высокочастотности и.с другой стороны, пренебречь изменениями свойств объекта в течение переходного процесса самонастройки, считая их достаточно медленными. ГЛАВА ПЯТНАДЦАТАЯ САМООРГАНИЗУЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ i 15-1. простейшие самоорганизующиеся системы автоматического управления (без самообучения) . Самоорганизуюпщеся САУ - это адаптивные САУ, в которых адаптация осуществляется путем изменения алгоритма, т. е. структурной схемы управляющего устройства УУ основной САУ. Самоорганизующиеся САУ можно представить такой же общей функциональной схемой, как и самонастраивающиеся САУ (см. рис. 14-1). Однакоздесь воздействия У со стороны управляющего устройства адаптации УУ на управляющее устройство УУц основной САУ вызывают не изменения численных значений настроечных параметров, а осуществляют переключения в структурной схеме УУд. Таким образом, в самоорганизующихся САУ сигнал У является дискретным сигналом, каждому значению которого соответствует определенная схема УУо, т. е. определенный алгоритм управления объектом. Примером простейшей самоорганизующейся САУ является самоорганизующаяся САУ с адаптацией коррекции (рис. 15-1). Варьируемая часть УУ, основной системы представляет собой набор определенного числа корректирующих звеньев /Г3{, которые включаются в контур основной САУ или отключаются от нее исполнительными реле ИР управляющего устройства адаптации. (На рис. 15-1 условно показано, что все корректирующие звенья являются последовательными корректирующими звеньями.) Задача управляющего устройства адаптации заключается в стабилизации или оптимизации принятого критерия качества управления / путем выбора определенного корректирующего звена или комбинации этих звеньев. Цепи пробного и при необходимости поискового сигналов для простоты на рисунке не показаны. Возможна комбинация описанной самоорганизующейся САУ и системы самонастройки численных значений параметров корректирующих звеньев. В этом случае появляются два этапа (уровня) адаптации: первый этап - выбор структуры, т. е. выбор типа коррекции (выбор определенного корректирующего звена или их комбинации), второй этан - самонастройка параметров выбранной коррекции. Возможность изменения структуры в ходе адаптации резко расширяет диапазон изменения свойств объекта и внешних условий, в которых самоорганизующаяся САУ сохраняет работоспособность с выполнением заданных требований к качеству унравления, по сравнению с самонастраивающимися САУ, рассмотренными в предыдущей главе. Разумеется, это достигается ценой существенного усложнения контура адаптации. 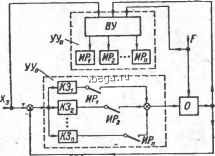 Рис. 15-1. Простейшая самоорганизующаяся САУ. Примером более сложной адаптивной САУ рассматриваемого тииа является самоорганизующаяся система ПВО. На рис. 15-2 показана укрупненно схема контура адаптации такой системы. Здесь имеются две действующие друг на друга стороны - средства ПВО и средства противника. Средства ПВО подчинены через телеуправляемые исполнительные устройства ИУ управляющей цифровой вычислительной машине ЦВМ. Последняя также посредством системы связи получает сведения о состоянии (действиях) противника F и своих средств ПВО X. На основании этой текущей информации, а также заданной цели (Х3), к которой следует стремиться, ЦВМ выбирает наилучший очередной шаг (этан) в действиях средств ПВО. После получения информации о положении дел в конце зтого шага определяется оптимальный следующий шаг и т. д. Таким образом, работа ЦВМ заключается в поиске наилучшего решения дискретной многошаговой задачи с учетом изменений в объекте управления и внешних условий в ходе решения. Оптимизируемым критерием качества управления в данном случае принимается минимаксный критерий, поскольку здесь в чистом виде имеет место ситуация организованного противодействия . Таким образом, рассматриваемая система управления является игровой САУ (см. § 13-4). Поскольку оптиьшзируемый процесс представляет собой многошаговый процесс, поиск решения осуществляется обычно методом динамического программирования (см. § 13-2). Приведенная на рис. 15-2 схема является предельно упрощенной. Здесь не показаны местные обратные связи отработки заданий в самих средствах ПВО. В частности, подобные большие системы, как правило, делаются многоступенчатыми, т. е. имеют иерархическую структуру с рядом местных ЦВМ, управляющих отдельными частями средств ПВО и подчиненных центральной ЦВМ. Средства ПВО Средства противника Рис. 15-2. Схема самоорганизующейся системы управления ПВО. § 15-2. ПОНЯТИЕ О САМООБУЧАЮЩИХСЯ СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В самом общем случае под самоорганизующейся системой в кибернетике понимается система, упорядоченность, организованность которой со временем возрастают. В предельном случае такая система в исходном состоянии представляет собой совокупность элементов, связанных друг с другом совершенно случайным образом. Затем в результате взаимодействия с внешней средой ностепенно в системе возникают стойкие связи между элементами т. е. возникает определенная структура со специализацией состав- ляющих ее элементов по выполняемым функциям. Прообразами технических самоорганизующихся систем являются живые орга- * низмы, .которые, как известно, и возникли путем самоорганизации в порядке эволюции из неживой природы. Первую техническую модель самоорганизующейся системы создал английский ученый Р. Эшби (гомеостат Эшби) [1]. Важнейшим свойством самоорганизующихся систем является их способность кобучению и самообучению, т. е. к самоусовершенствованию. Рассмотренные в предыдущем параграфе самоорганизующиеся САУ являются простей-щими САУ такого типа. Они не обладают какими-либо принципиально новыми возможностями но сравнению с самонастраивающимися системами. Однако благодаря тому, что в самоорганизующихся САУ структурная схема может целенаправленно изменяться в процессе эксплуатации, в них может быть реализована идея самоусовершенствования алгоритма работы. Такие самоорганизующиеся САУ - называются самообучающимися САУ. В этих системах качество управления (например, точность, .если она выбрана критерием качества управления) повышается со временем в ходе эксплуатации системы. Самообучающиеся САУ нредстаЬляют собой высший тин систем автоматического управления, стоящий но своим принципиальным возможностям на уровне живых существ. Именно на базе самоорганизующихся САУ в будущем будут созданы технические системы, превосходящие но своим мыслительным способностям человека. Однако в настоящее время работа по созданию САУ такого типа находится еще на самом начальном зтане. Работа идет пока глав ным образом в направлении копирования простейших образцов живой природы. Простейшую самообучающуюся САУ можно представить как результат автоматизации процесса усовершенствования алгоритма работы контура адаптации несамообучающейся адаптивной САУ, который до автоматизации должен был осуществляться человеком по мере накопления опыта эксплуатации системы. Для этого система дополняется вторым контуром адаптации со своим управляющим устройством, который действует значительно медленнее первого контура адаптации, корректируя алгоритм последнего но результатам анализа его многократной работы в ходе эксплуатации системы.. Очевидно, что управляющее устройство этого второго контура адаптации должно обязательно обладать памятью. Второй контур адаптации имеет свой критерий качества управления для вычисления которого и его оптимизации управляющее устройство этого контура воздействует на первый контур пробными и .поисковыми сигналами подобно тому, как управляющее устройство первого контура адаптации воздействует на контур основной £АУ. В :РВОю очередь, второй контур адаптации может быть дополнен еще более медленно действующим третьим контуром адаптации,
|