
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Г - генератор поискового сигнала Y, Д - детектор, выделяющий составляющую на выходе объекта Хр, вызванную сигналом Хпр. 3. ВУ представляет собой автоматический оптимизатор. Если в САУ со стабилизацией / вычислительное устройство выявляет отклонение / от заданного значения /3, т. е. определяет А/ = У - /з, то здесь выдаваемый ВУ сигнал А/ определяет отклонение / от экстремального значения. Необходимое для этого приращение У настроечного параметра Y создается генератором поискового сигнала Гц. В результате система самонастройки осуществляет автоматическое слежение за экстремумом J. Работа системы иллюстрируется на рис. 14-5, б. Здесь кривые 1,2 и 3 - зависимости / от У для трех последовательных моментов времени. При смещении экстремума/система самонастройки изменяет значение параметра Y так, чтобы / вновь имел экстремальное значение. Стрелками показан процесс изменения настройки для случая скачкообразного изменения зависимости / от Y. Таким образом, в САУ с экстремальной самонастройкой в общем случае требуются два специальных воздействия на основную САУ со стороны системы самона- 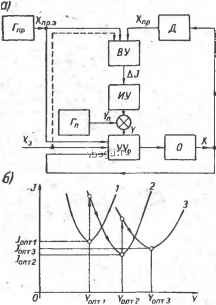 Рис. 14-5. Функциональная схема самонастраивающейся САУ с экстремальной настройкой коррекции. стройки: пробный сигнал Хр 3 (для определения / при фиксированном Y) и поисковый сигнал (для определения направления изменения настроечного параметра У для движения к экстремуму /). В отдельных случаях система может быть упрощена путем отказа от специальных сигналов Хр д и У. Отказ от специального пробного сигнала Хр 3 заключается в использовании вместо него естественных флуктуации на входе основной САУ, существующих при нормальной работе системы. Об этой возможности говорилось выше при рассмотрении самонастраивающихся САУ со стабилизацией динамических свойств (см. рис. 14-4). Соответствующее изменение в схеме на рис. 14-5, а показано пунктиром. Возможность создания самонастраивающихся САУ с оптимизацией качества управления без специального поискового сигнала основана на использовании уравнения объекта. Такие самонастраивающиеся САУ называются беспоисковыми или аналитическими [34]. Зная уравнение объекта и внешние воздействия (если последние необходимы для определения критерия Ькачества), можно аналитически определить оптимальную настройку гсистемы, как это и делается разработчиком при синтезе неадаптивных систем. В случае самонастраивающихся САУ этот расчет должен выполняться вычислительным устройством контура самонастройки. Наиболее простой случай при этом будет, когда урав-j нение объекта известно заранее и неизменно, а причиной само-шастройки является изменение внешних условий работы системы. В этом случае цепь самонастройки на экстремум осуществляется в виде разомкнутой системы компенсации, изменяющей настройку основной САУ в функции внешних воздействий. В наиболее общем случае изменяющегося (неизвестного) уравнения объекта задача контура самонастройки заключается, во-первых, в определении уравнения объекта (с помощью пробных сиг-калов или с использованием реакции на естественные входные \ воздействия - см. § 14-2) и, во-вторых, в вычислении оптимальных значений настроечных параметров системы управления. Для выполнения расчетов в качестве вычислительного устройства обычно используют специальные цифровые вычислительные ма-шинтл. Широкое применение получили вычислительные устройства с динамической моделью объекта, [Которая автоматически подстраивается по объекту так, что урав- пение модели с достаточной точностью совпадает с уравнением объекта. Поиск оптимальной настройки осуществляется на модели, и найденная настройка переносится затем на основную САУ. Применение модели объекта часто позволяет существенно упростить вычислительное устройство и весь контур самонастройки. Основное достоинство беспоисковых самонастраивающихся САУ заключается в отсутствии поисковых воздействий на объект, которые всегда нежелательны, так как являются для основной САУ внешними возмущениями, нарушающими режим ее работы. Б. Системы экстремального регулирования Эти системы являются простейшими самонастраивающимися , САУ с оптимизацией качества управления. В них поддерживается - вкстремальное значение такого критерия, который характеризует работу объекта астатическом режиме, т. е. обесног швается работа в точке экстремума соответствующей статической характеристики. Хорошим примером системьк экстремального регулирования f является система автоматической настройки колебательного контура в резонанс (рис. 14-6, а). Такая задача существует, в част-10СТИ, в радиоприемных и радиопередающих устройствах. Конур LC настраивается с помощью переменного конденсатора С. 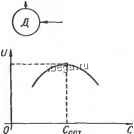 Задача настройки - установка такого значения емкости С, при котором резонансная частота контура совпадает с частотой / подаваемого на контур напряжения. Признаком такой настройки является максимум напряжения на резонансном контуре. Таким образом, задача настройки сводится к определению значения С, соответствующего максимуму напряжения на резонансном контуре (рис. 14-6, б). Причиной ухода от резонансной настройки может быть изменение частоты / подаваемого на контур напряжения или изменение параметров контура, например, из-за изменения температуры. Экстремальный регулятор состоит из усилителя У, усиливающего напряжение U, снимаемое с контура; вычислительного устрой-0 ства ВУ и исполнительного двигателя Д, поворачивающего ротор конденсатора С. Вычислительное устройство автоматически выполняет ту же логическую задачу, что и оператор при ручной настройке контура. После включения в работу оно определяет направление, в котором до изменять емкость, чтобы напряжение на контуре возрастало, т. е. определяет направление движения в сторону экстремума. Для этого исполнительный двигатель включается вначале в одном направлении, а затем при необходимости - в другом, и устанавливается искомое направление вращения. Формально оно может быть определено, например, по условию, чтобы первые производные по времени от С и С/ имели одинаковый знак (см. рис. 14-6, б). Движение в найденном направлении продолжается до тех пор, пока напряжение U не начинает уменьшаться после прохождения максимума. Тогда вычислите.ль-ное устройство изменяет направление вращения двигателя, чтобы вернуться в точку экстремума. В установившемся режиме исполнительный двигатель периодически реверсируется, создавая небольшие колебания напряжения относительно максимума, с помощью чего все время контролируется местоположение последнего. Другим примером системы экстремального регулирования является система регулирования скорости двигателя внутреннего сгорания на максимум к. п. д. Статическая зависимость к. п. д. от скорости двигателя имеет максимум, который смещается при изменении нагрузки, качества топлива, температуры и других Рис. 14-6. Система экстремального регулирования колебательного контура. внешних условий. Система экстремального регулирования обеспечивает поиск и поддержание величины скорости двигателя, соответствующей максимуму значения к. п. д. Принцип действия экстремальной системы регулирования тот же, что и контура самонастройки в САУ с оптимальной настройкой коррекции.Однаков связи с тем, что здесь критерий качества/ является статической функцией настроечных параметров Y и определяется в статическом режиме, в системах экстремального регулирования не требуется пробных сигналов Х р 3, которые необходимы для определения динамических показателей качества в САУ с оптимальной настройкой коррекции. Что касается поисковых сигналов, то, как и в случае САУ с оптимальной настройкой коррекции, возможны и бесноисковые системы экстремального регулирования, основанные на использовании в том или ином виде уравнения статики объекта (см. § 14-2). В. Методы поиска экстремума функции J Рассмотрим методы, с помощью которых вычислительное устройство может осуществлять поиск экстремума критерия качества, т. е. рассмотрим возможные алгоритмы поиска. В случае, когда / является функцией одной переменной У, направление движения к экстремуму определяется знаком производной dJIdY, а признаком наличия экстремума будет равенство , нулю этой производной, т. е. = 0 (рис. 14-7,а). В общем случае, когда число настроечных параметров У равно п, т. е. / (У1, Уз. У ) является функцией п переменных, направление движения к экстремуму определяется градиентом, т. е. вектором grad/ = 2 i i = l где А; (j = 1, 2, и) - единичные векторы координатных осей F.. В точке экстремума grad / = О, т. е. = 0, i = U2,...,n. Сказанное иллюстрируется рис. 14-7, бив для случая п = 2. Метод нахождения экстремума / путем изменения координат Y таким образом, что движение к экстремуму осуществляется : строго по градиенту (см. траектории на рис. 14-7, бив), называется Методом градиента. Для осуществления движения но градиенту каждая координата Y должна изменяться со скоростью, пропорциональной значения соответствующих частных производ- ных dJ/dYi. Однако этот метод - не единственно возможный способ достижения экстремума. Существует целый ряд методов поиска экстремума, которые проще метода градиента в отаошении реализа- QJ . б) gradJ 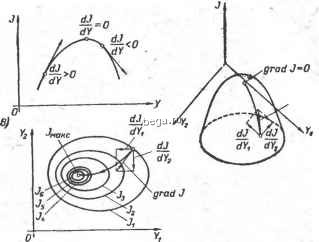 Рис. 14-7. Метод градиента. ции. Кроме того, как будет показано ниже, метод градиента далеко не всегда наилучший и в отношении быстроты нахождения экстремума. Основными методами поиска экстремума, помимо метода градиента, являются метод наискорейшего спуска, метод Гаусса - Зейделя и метод слепого поиска. Метод наискорейшего спуска состоит в следующем (рис. 14-8, траектория 2). В начальной точке находится направление вектора grad / и организуется движение в этом направлении до тех пор, пока не прекратится увеличение / (в случае поиска максимума), т. е. не обратится в нуль производная от / но принятому направлению движения. Как видно из рис. 14-8, этому моменту соответствует касание траектории с линией / = const. В этой точке касания вновь определяется направление вектора grad /, и движение продол- 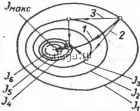 Рис. 14-8. Метод наискорейшего спуска (2) и метод Гаусса - Зейделя {3). Название метода предполагает, что экстремум представляет собой минимум, однако в равной мере этот метод применим и для поиска максимума. жается по этому новому направлению опять до момента изменения знака приращения / и т. д. Таким образом, метод наискорейшего спуска проще метода градиента (кр:ивая 1 на рис. 14-8) в том отношении, что требует определения направления grad / только в небольшом числе точек траектории. Метод Гаусса - Зейделя дает траекторию 3 на рис. 14-8. Он заключается в поочередном изменении каждой из координат Y до момента обращения в нуль соответствующей частной производной dJIdY. Таким образом, здесь поиск функции нескольких переменных сводится к последовательному нахождению экстремума этой функции от каждой из переменных. Поэтому данный метод технически еще проще,-чем метод наискорейшего спуска. Метод случайного (слепого)поиска заключается в поиске экстремума путем случайного изменения координат Fj. Из начального положения делается случайный шаг приданием координатам случайных приращений и определяется приращение /. Если приращение / отрицательно (при поиске максимума), производится возврат в исходную точку и делается новый случайный шаг. Так продолжается до тех пор, пока не будет получено положительное приращение /. Тогда система переводится в эту новую точку и из нее производятся новые случайные шаги, как из исходной точки. Существуют и другие варианты случайного поиска. Так, можно, [совершив несколько пробных случайных шагов из исходной точки [и найдя для каждого шага приращение /, определить по этим \ приращениям как по составляющим вектора направление наиболее : интенсивного изменения У и в этом направлении делать рабочий (шаг. Такой метод называется методом статистиче-ского градиента. В найденном направлении можно делать не один шаг, а двигаться, пока приращение / не изменит iзнака. Такой метод называется методом статистиче-кого наискорейшего спуска. Достоинством метода .случайного поиска является отсутствие контроля зависимости J от каждой из координат Y в отдельности. [Поэтому в отличие от рассмотренных выше детерминированных методов поиска увеличение числа координат У,- в случае случай-аого поиска не усложняет процедуры поиска. Так, доказано, что 1ри числе координат Y более трех случайный поиск по скорости остижения экстремума превосходит градиентный метод и другие юречисленные выше детерминированные методы [37]. Другим достоинством метода слзайного поиска перед детерми-арованными методами является пригодность его при наличии аескольких экстремумов, из которых необходимо найти глобаль-лй (максимум максиморум в случае поиска максимума), а такке ри наличии особых точек, в которых градиент / обращается I нуль. Во всех этих случаях методы, основанцые на поиске точки
|