
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления адаптации, адаптивные системы делятся на самонастраивающиеся и самоорганизуюпщеся. В самонастраивающихся САУ адаптация осуществляется изменением значений параметров основного управляющего устройства УУ, а в самоорганизующихся САУ изменяется структура УУ- Приведенная выше классификация адаптивных САУ не является установившейся в связи с новизной самих адаптивных систем (см. работы [9; И; 22; 34; 35; 36]). § 14-2. САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СО СТАБИЛИЗАЦИЕЙ КАЧЕСТВА УПРАВЛЕНИЯ В названных системах адаптация заключается в стабилизации заданного значения критерия качества / путем изменения настройки основного управляющего устройства УУ (см. рис. 14-1). Это осуществляется с помощью настроечных параметров, которые при ручной настройке должны устанавливаться человеком, а в данном случае изменяются автоматически специальным исполнительным устройством, входящим в состав управляющего устройства I 1- О адаптации УУ
Основное распространение получили самонастраивающиеся САУ такого типа для стабилизации динамичес к и х свойств систем. Критериями качества при этом являются различные косвенные критерии качества переходных процессов Хкорневые, частотные, интегральные), статистический критерий точности в виде среднеквадратичного отклонения и непосредственно динамические характеристики объекта, т. е. его частотные и переходные характеристики. На рис. 14-2, а показана функциональная схема САУ со стабилизацией динамических свойств. Пунктиром обведены основная САУ и управляющее устройство адаптации.. Последнее состоит из генератора Гр пробных сигналов Хр., детектора Д этих сигналов на выходе объекта О, вычислительного устройства ВУ и исполнительного устройства ИУ. Цифрами i и 2 обозначены контур основной САУ и контур самонастройки. Пробный сигнал является специально выбранным воздействием на систему, по реакции на которое можно определять текущее значение выбранного критерия качества. Детектор Д служит для вы- Рис. 14-2. Функциональная схема самонастраивающейся САУ со стабилизацией динамических свойств. еления из общего выходного сигнала X, обусловленного всеми аешними воздействиями, приложенньйш к системе, составляющей l p, вызванной именно пробным сигналом Х р. 3. Вычислительное устройство ВУ по величине входного проб-10Г0 воздействия Х р 3 и реакции Хр системы на него вычисляет величину отклонения А/ критерия качества от его заданного эна-ения и подает соответствующий сигнал на исполнительное устройство ИУ. Последнее обычно представляет собой звено интегрирующего типа. Оно изменяет настройку управляющего устройства эсновного контура в направлении, соответствующем знаку отклонения ДУ. В качестве настроечных параметров в УУ выбираются такие параметры, изменяя которые, можно в необходимых преде-Рлах изменять величину выбранного критерия /. Ими могут быть [коэффициент усиления, коэффициенты и постоянные времени кор-Гректирующих звеньев. На рис. 14-2, а изображена приведенная [одноконтурная схема основной САУ. В действительности она может риметь любую структуру. На рис. 14-2, б показан распространенный вариант вычисли-i тельного устройства ВУ с эталонной моделью. Модель амеет динамические характеристики, являющиеся эталоном для [юдстраиваемой под нее основной САУ. Применение модели упрощает вычислительное устройство, так как вычисление критерия {ачества / и эатем ~его отклонения от заданного значения заме-Гняется определением разности сигналов на выходе этой модели и объекта. (Эта операция требует более простого вычислительного устройства, обозначенного на рис. 14-2, б как ВУ.) В качестве пробного сигнала Х р 3 применяют ступенчатый 1и импульсный сигналы, гармонический сигнал, случайный сигнал, например белый шум, или, наконец, действующие на систему есте-ственные воздействия. Выбор пробного сигнала определяется видом критерия качества /, т. е. теми динамическими характери-стиками системы, которые требуется контролировать. I Например, колебательность системы может быть оценена путем вычисления отношения соседних максимумов или числом колеба-ний (числом перемен знака) реакции X на ступенчатое или импульс-.ное пробное воздействие. В этих случаях контур самонастройки работает периодически, для чего генератор пробных сигналов выдает сигналы с определенной частотой следования. В интервале между этими сигналами вычислительное устройство самонастройки Определяет величину колебательности, сравнивает ее с заданным значением и формирует стабилизирующий колебательность сигнал .подстройки УУо [36]. Колебательность системы может быть опреде-Рлена и с помощью частотных критериев качества, для чего приме-[няются гармонические пробные сигналы. Вместо косвенных показателей качества переходного процесса можно, как говорилось выше, стабилизировать непосредственно i частотные или переходные характеристики системы или же коэф-фициенты ее передаточной функции. Так, частотную характери- стику стабилизируют в отдельных точках, стабилизируя, например, резонансную частоту или ординаты характеристики, соответствующие определенным значениям частоты. На рис. 14-3, а приведена схема самонастраивающейся САУ со стабилизацией одной точки амплитудной частотной характеристики, соответствующей частоте пр, выдаваемой генератором Гдр. Настройка осуществляется путем изменения коэффициента усиления ку основного управляющего устройства. Фильтр представляет собой эталонную модель (см. рис. 14-2,6), ордината амплитудной частотной характеристики которой на частоте (Ощ) соответствует требуемой ординате Л 3 ((ор) настраиваемой замкнутой системы. Узкополосный фильтр Фу служит для выделения колебательной составляющей выходной величины X с частотой <йщ,. Вычислительное устройство ВУ состоит из двух выпрямителей В и элемента сравнения, на выходе которого получается сигнал, пропорциональный отклонению ДЛз (<й р) ординаты амплитудной частотной характеристики Ад (о) от заданного значения (рис. 14-3, б). Исполнительное устройство ИУ состоит из усилителя У и вспомогательного двигателя . ВД, перемещающего движок потенциометра, с помощью которого регулируется коэффициент усиления ку. Для стабилизации нескольких точек частотной характеристики применяют соответствующее количество точно таких же контуров самонастройки, каждый из которых работает на своей частоте (Ощ,. Исполнительное устройство каждого контура воздействует на свой настроечный параметр, общее число которых, таким образом, равно числу контролируемых точек частотной характеристики. С помощью подобной же схемы можно стабилизировать и. фазовую частотную характеристику. В этом случае вычислительное устройство должно давать соответственно не разность амплитуд ДЛд (сОдр)-, а разность фаз Дф (© р) колебаний на выходе фильтров Ф1 и Фг- Необходимость контролировать сразу две частотные характеристики - амплитудную и фазовую - возникает только в случае неминимально-фазовых систем. В минимально-фазовых системах достаточно стабилизировать одну из них, в качестве которой обычно 6epjT амплитудную характеристику, поскольку в этих системах указанные характеристики однозначно друг с другом 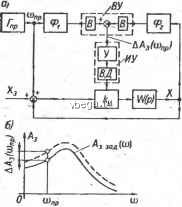 Рис. 14-3. Схема самонастраивающейся САУ со стабилизацией амплитудной частотной характеристики в точке Шпр- Аналогичным образом можно стабилизировать действительную мнимую характеристики [11]. В качестве пробного сигнала применяют и случайные воздей-гвия.Путем статистической обработки случайного входного сигнала выходной реакции на него принципиально можно полностью опре-елить переходную (весовую) и частотные функции системы. Как было показано в § 3-2, корреляционные функции входного и выход-юго сигналов однозначно связаны через весовую функцию и анало-I4H0 спектральные плотности этих сигналов связаны амплитудно-Ьазовой частотной функцией. Таким образом, вычислив с помощью оррелятора названные корреляционные функции или спектральное плотности, можно определить весовую или частотные функции Иеистемы. Такой статистический Рис. 14-4. Функциональная схема самонастраивающейся САУ без специального пробного сигнала. связаны (см. § 1-3). 330 подход является наиболее уни-.версальным для определения характеристик как линейных, [так и нелинейных объектов [34; гЗб]. В качестве пробного сигнала в отдельных случаях можно ис- Р.пользовать и естественные внешние воздействия. При этом отпадает необходимость в специальном генераторе. Напри- , мер, если в случае схемы на рис. 14-3, а с синусоидальным пробным сигналом в спектре воздействия Xg постоянно содержится достаточно большая составляющая с частотой (0, можно обойтись без генератора I Г р, подавая на вход фильтра Ф, непосредственно входное воздей-. ствие Xg. При этом такой фильтр должен быть сделан достаточно узкополосным с настройкой на частоту Юцр.. Еще большие возможности применения вместо пробного сигнала естественных внешних, воздействий возникают при статистическом методе определения динамических характеристик системы с ПОМОНЦ.Ю автоматического коррелятора. На рис. 14-4 показана схема самонастраивающейся системы, в которой вместо пробного сигнала используется входное воздействие Хз. Выше предполагалось, что стабилизация динамических свойств осуществляется для всей основной САУ в целом. Точно так же можно стабилизировать и отдельную часть этой системы. При этом система самонастройки будет охватывать непосредственно эту часть системы, т. е. пробный сигнал должен подаваться непосредственно на ее вход, а сигнал на вход контура самонастройки должен сниматься с ее выхода. Разумеется, в составе стабилизируемой части системы должно быть звено с управляемыми с помощью исполнительного устройства самонастройки параметрами. К контуру самонастройки предъявляются следующие два основных требования: а) быстродействие контура должно быть больше быстроты изменения стабилизируемых динамических свойств основной САУ; б) пробные сигналы должны быть достаточно малы, так как они представляют собой помеху для работы основной САУ. Первое требование очевидно - при его невыполнении система самонастройки не сможет обеспечить стабилизацию динамических свойств системы. В частотном выражении это требование заключается в том, что полоса пропускания системы самонастройки должна быть шире частотного спектра изменения параметров основной САУ. Ясно, что чем выше быстродействие системы само-, настройки, тем меньше могут быть сделаны отклонения динамических свойств основной САУ в процессе самонастройки. Верхний предел быстродействия jtOHTypa самонастройки ограничен инерционностью основной САУ, поскольку она ограничивает время, необходимое для определения значения критерия качества J. Действительно, это время включает в себя время, требуемое для определения реакции основной САУ на пробное воздействие и поэтому заведомо больше длительности переходного процесса в основной САУ. Практически можно считать, что длительность процесса самонастройки на порядок больше длительности переходного процесса в основной САУ. Требование достаточной малости пробных сигналов сводится к тому, что пробные сигналы должны быть достаточно малы по сравнению с отклонениями, существующими в процессе нормального функционирования основной САУ. В противном случае пробные сигналы вызовут существенное ухудшение точности работы основной системы. Предел уменьшению пробных сигналов создается трудностью выделения их из общего выходного сигнала X системы. Таким образом, в системах самонастройки большое значение имеет задача выделения сигнала на фоне шума. Эта задача требует тем большего времени, чем меньше сигнал, поскольку приходится усреднять реакцию системы на несколько пробных сигналов, т. е. применять статистические методы выделения полезного сигнала из шума. Из сказанного следует, что выполнение требований в отношении малости пробного сигнала и быстродействия самонастройки вызывает необходимость компромиссного решения. § 14-3. САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ОПТИМИЗАЦИЕЙ КАЧЕСТВА УПРАВЛЕНИЯ Эти системы называются еще экстремальными самонастраивающимися САУ. В отличие от рассмотренных выше самонастраивающихся САУ со стабилизацией качества [управления задачей самонастройки в этих САУ является ноддер-[жание оптимального значения критерия качества унравления У. [Последний в данном случае может быть назван, следовательно, [критерием оптимальности, как в случае неадаптированных онти-альных САУ (см. тринадцатую главу). Рассматриваемые само-[настраивающиеся САУ, как и вообще адаптивные САУ с оптимиза-ней качества управления, отличаются от неадантивных онтималь-[ных САУ наличием такого автоматического изменения алгоритма [управления, при котором обеспечивается оптимальное управле-[ние, т. е. оптимум выбранного критерия качества управления, при 1зменениях внешних условий и свойств объекте. Таким образом, управляющее устройство УУ контура адапта-Гции автоматически решает задачу оптимизации, которую однократ-но решает конструктор неадаптивной оптимальной системы при конструировании. Такая автоматическая опти-►м и 3 а ц и я может рассматриваться как особый тип автоматического управления наряду с управлением по внешним воздей-[ствиям (компенсация) и управлением по отклонению. Основой автоматической оптимизации является а в т о м а -Этический поиск оптимального алгоритма основного управ-Гляющего устройства У У о, хотя существуют и беспоисковые САУ с автоматической оптимизацией. Среди самонастраивающихся САУ с автоматической оптими-[зацией качества управления основное распространение получили: а) САУ с экстремальной настройкой коррекции и б) системы экстремального регулирования. В нервом случае оптимизируются динамические свойства ястемы, а во втором - статические. \А.. САУ с экстремальной настройкой коррекции В этих системах целью самонастройки является поддержание гэкстремума какого-либо критерия качества, характеризующего к динамические свойства системы, путем изменения настройки кор-1 ректирующих звеньев основной САУ. Чаще всего таким критерием качества является показатель качества переходного процесса или [точность основной САУ при случайных воздействиях. Поиск экстремума критерия качества / осуществляется с но-[мощью поискового изменения настроечных параметров корректирующих звеньев, от которых зависит величина /, и вычисления Еоответствующего приращения У. На основании этого онределя-втся направление, в котором следует изменять настройку коррек-Гции, чтобы приблизиться к экстремуму/и в конце концов найти его. Вычисление J при определенной настройке производится, ккак и в случае САУ со стабилизацией J, с помощью подачи на вход основной САУ пробного сигнала Xp,. На рис. 14-5, а приведена схема САУ с экстремальной настрой-,кой коррекции. Здесь / р - генератор пробного сигнала Хдр 3,
|