
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления означает, что на протяжении всей траектории скалярное произ-. ведение вектора скорости v = dX/dt на вектор, обратный градиенту времени перехода в конечную лючку, должно быть максимально . Если обозначить это произведение через Н, а вектор, обратный градиенту времени перехода, через я]?, т. е. я)? = - grad t (см. рис. 13-4, а), то это усло-° вие можно записать следующим образом: t = U=const Я=фу=2{{ = (13-11) i==l  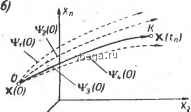 где и Vi -координаты векторов я)? (г}1, гр2, я)) ) и V (v, Vn), т. е. условием оптимальности является максимум проекциивектора v на направление Я5. Сформулированное условие оптимальности и есть принцип максимума Л. С. Понтрягина. В общем случае произвольного критерия оптимальности Q (13-5) поверхности постоянного значения этого критерия называются изопо верхностя м и. Условие онтимальност! при этом сохраняется прежним т. е. в виде максимума скаля ра Н, с той только разницей что в уравнении объекта добав ляется новая координата Хр согласно уравнению (13-7), мини мизация конечного значения которой определяет цель управления Практическая методика нахождеЦия оптимального закона управления U (t) и соответствующей оптимальной траектории X (f) не требует определения изоповерхностей. Необходимые для решения задачи векторы я5 находятся без этого с помощью следующих так называемых сопряженных уравнений, справедливых для оптимальной траектории (их вывод см., например, в работе [29]): 1-1Ь% (13-12) 1 = 1, 2, и, n-f 1. Рис. 13-4. К принципу максимума. * Напомним, что скалярное произведение двух векторов равно, произведению их модулей на косинус угла между ними. Здесь Xi, Х2, Х - выходные координаты объекта, а Zq и J - дополнительные координаты, введенные уравнениями и (13-8). Уравнения объекта и сопряженные уравнения можно предстать в виде уравнений Гамильтона, если ввести в них шчияу Н, учитывая, что, согласно (13-11), 17) [[так как не зависит от %) и что дН V , dvj Щ ргда dt ~di dt ~ дх- (13-13) (13-14) .1ервые уравнения - это уравнения объекта, а вторые - сопря-женные уравнения). Соответственно скаляр Й называется г а -ильтонианом. Наша задача - найти закон управления U (t), дающий в результате совместного решения уравнений объекта (13-13) и сопря-енных уравнений (13-14) такую траекторию движения X (t), ия которой значения Н в ее точках будут максимальны. Основная сложность здесь заключается в том, что нам известны не все начальные условия задачи: даны начальные значения X (0), но не известны начальные значения я5- (0) введенной нами вспомога-[тельной величины я5. Если задаться произвольными начальными значениями я5 (0) решить совместно уравнения объекта и сопряженные уравнения, Гполучим оптимальную траекторию, которая пройдет мимо заданной конечной точки К (рис. 13-4, б). Само построение оптимальной траектории при этом может осуществляться путем разделения ррремени на достаточно малые интервалы и определения опти-пьного значения U последовательно для каждого интервала ао условию получейия максимума значения Н. Оптимальное Гправление определяется методом последовательных приближений иосредством задания последовательно разных начальных значе- (0) до тех пор, пока не будет получена оптимальная траек-ория, проходящая через заданную конечную точку. При приме-внии вычислительной машины этот процесс может быть автома-хзирован путем организации поиска (0) по условию минимизации расстояния до находимых траекторий от заданной конечной очки при одновременной максимизации гамильтониана Н на атервалах Д отдельных просматриваемых траекторий. I 1 4 Принцип максимума - необходимое и достаточное условие оптимальности только для линейных объектов. Для общего случая нелинейных объектов он является только необходимым [29]. Пример применения принципа максимума приведен в следующем параграфе. § 13-3. ОПТИМАЛЬНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИ ДЕТЕРМИНИРОВАННЫХ ВОЗДЕЙСТВИЯХ А. Понятие об оптимальных по быстродействию САУ. Теорема об п интервалах Рассмотрим в качестве типовой эту практически часто встречающуюся задачу управления, оптимального по быстродействию. В линейной САУ быстродействие может быть сделано сколь угодно большим путем введения соответствующей коррекции. Например, как было показано в § 7-2, в случае статического звена первого порядка с передаточной функцией включение перед ним пропорционально-
 дифференцирующего звена позволяет полностью скомпенсировать инерционность основного звена и получить бесконечно большое быстродействие, т. е. идеальное звено с *п = 0. (Для звена п-то порядка получение такого же результата требует корректирующих воздействий по п производным). Однако реальные САУ нелинейны - в них всегда существуют ограничения переменных величий и их производных (см. § 8-1). Если же в САУ ограничена хотя бы одна переменная, это ограничивает и время переходных процессов в ней. В частности, упомянутый выше случай полной компенсации инерционности статического звена первого порядка путем введения дополнительного воздействия ,по производной практически не реализуем, так как при скачкообразном изменении входного сигнала сигнал по его производной будет бесконечно велик и, следовательно, не может быть пропущен звеном без искажения вследствие ограничения (насыщения) его статической характеристики. Например, если этим звеном является электрический двигатель постоянного тока, его выходной величиной - скорость, а входной - напряжение якоря, то из-за ограничения величины этого напряжения макси- Рис. 13-5. Пример оптимального по быстродействию управления объектом первого порядка. lep Нел  [ально допустимым значением (по условию прочности изоляции механической целостности якоря при действии центробежных л) время переходного процесса изменения скорости от одного *ее значения до другого тоже получается ограниченным. Начнем рассмотрение задачи оптимального по быстродействию равления с простейшего случая, когда внешнее воздействие, вызывающее переходный процесс, представляет собой ступеньку, т. е. постоянно в течение переходного процесса. Пусть объект равления /Является линейным статическим звеном первого [орядка со статической характеристикой с насыщением, т. е. входной управляющий сигнал U ограничен по величине значением /7др (рис. 13-5, а и б). (Этим звеном можно считать, например, двигатель постоянного тока, у которого вход - напряжение, ограниченное- определенным пределом, а выход - скорость вращения вала). Рассмотрим вопрос, каким образом следует изменять управляющий сигнал U, чтобы обеспечить максимально быстрое изменение сигнала X, скажем, от нуля до определенного значения Хр- (В случае двигателя, таким образом, речь идет о максимально быстром его разгоне до определенной скорости.) Начальные условия будем считать пока нулевыми. Оптимальный процесс управления показан на рис. 13-5, в. Для обеспечения возможно быстрого изменения X необходимо, очевидно, сигнал U мгновенно изменять до предельно допустимого значения U, и удерживать это значение до тех пор, пока X не достигнет заданного значения Х,.. При этом X будет изменяться с максимально возможной, с учетом ограничения V, быстротой. После этого U следует мгновенно уменьшать до значения, соответствующего по статической характеристике X = Хр- На этом ереходный процесс заканчивается. Его длительность опре-яется инерционностью звена, т. е. постоянной времени Т, величиной ограничения C/j,p и, конечно, заданными начальными и конечными значениями X. При этом, чем больше С/р, тем меньше fj,: при ?7j,p -> оо время tn -* оо. (Последний предел как раз и получается при компенсации инерционности линейного звена введением дополнительного воздействия по производной.) Аналогично будет обстоять дело и в случае интегрирующего звена kip, только на рис. 13-5, в экспоненты заменятся прямыми линиями. Пусть теперь имеем линейный объект второго порядка, например, в виде двух последовательно соединенных статических звеньев первого порядка (рис. 13-6, а) при наличии по-прежнему ограни-Г чения и. (Это может быть тоже задача разгона двигателя, но описываемого уравнением второго порядка.) Оптимальный пере-. ходный процесс показан на рис. 13-6, б. Так как сигнал U ограничен, то ограниченным является и сигнал Х на входе второго звена. Его предельное значение Лр = ktJ,. Входной сигнал U едует изменять так, чтобы сигнал X, был предельно близок по рме оптимальному управляющему сигналу для звена первого порядка, показаппому па рис. 13-5, в. Для этого сигнал U на входе первого звена вначале мгновенно доводится до своего предельного значения U, что обеспечивает максимально быстрый рост в сторону его предельного значения. Затем для возможно быстрого сброса сигнала Х до его значения Xic, соответствующего требуемому значению Zg управляющий сигнал U мгновенно переключается с -f /др на -Up и сохраняет это значение до тех пор, пока Х не снизится до величины Хт В этот момент V мгновенно доводится до значения ?7дт = Х/к, на чем процесс управления заканчивается. Из-за наличия первого инерционного звена передний и задний фронты импульсов Xi на входе второго звена получаются не вертикальными, как на рис. 13-5, в. Соответственно длительность переходного процесса оказывается больше. Итак, в случае двух звеньев первого порядка процесс управления состоит из двух интервалов: в первом
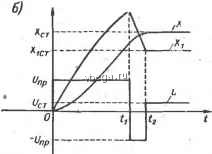 Рис. 13-6. Пример оптимального по быстродействию управления объектом второго порядка. цр, а во втором и = -Uap. Аналогично можно показать, что в случае трех звеньев первого порядка оптимальный процесс управления будет состоять из трех интервалов, в каждом из которых управляющий сигнал и принимает одно из двух своих предельных значений ztzUp с изменением его знака на границах интервалов. При этом знак U в первом интервале совпадает со знаком 7. Такое управление получается в связи с тем, что сигнал на входе второго звена должен быть предельно близок сигналу U на рис. 13-6, б. Для обеспечения этого управляющий сигнал должен иметь уже три интервала с разными предельными значениями. При этом вследствие инерционности первого звена сигнал на входе второго звена будет в отличие от сигнала U на рис. 13-6, б иметь не вертикальные, а пологие фронты. Экстраполируя, можнозаключить, что в общем случае п последовательно соединенных линейных звеньев первого порядка или, что то же самое, в случае линейного объекта п-го порядка с действительными отрицательными корнями характеристического уравнения оптимальное управление при наличии ограничения управляющего сигнала состоит из п интервалов, в каждом из которых этот сигнал принимает свое предельное значение, т.е.управление является чллм. в конце каждого интервала происходит изменение управляющего сигнала. Знак сигнала в начале процесса правления определяется требуемым направлением изменении входного сигнала X. Этот вывод получен для нулевых начальных условий. В случае щнзвольных начальных условий число интервалов может быть le п (вплоть до одного). Действительно, пусть, например, момент начала рассматриваемого процесса управления исходное ояние объекта, т. е. значения U, X жжх производных, оказалось таким, как в конце к-то интервала оптимального управления J случае перевода объекта в то же заданное состояние, но при нулевых начальных условиях. Тогда рассматриваемый оптималь-ш процесс будет содержать, очевидно, только (и - к) интер-[IOB. Проведенное рассмотрение основано на сформулированном § 13-2 принципе оптимальности, заключающемся в том, что ой коненый участок оптимальной траектории является ке оптимальной траекторией.. Сформулированное полож1ение о числе интервалов оптимального (быстродействию управления впервые было доказано А. А. Фельд-вумом и носит название теоремы об п интервалах. Докажем эту теорему строго с помощью принципа максимума 1онтрягина в порядке примера его применения [29]. Представим равнение объекта в виде системы уравнений: -§ = i(Xi,X ...,X) + bfJ, i = U2,...,n в векторной форме: (13-15) (13-16) -Ддесь и - управляющее воздействие, а X (Х, Х, Х,), Ч(ф1 Ф2. Фп) и Ь (6i, 62. &J - векторы. Функции считаем чфференцируемыми. Ограничение принимаем в виде: С/1С/пр- (13-17) Согласно (13-И), гамильтониан Я = уя5 = [ф (X) -Ь btj я5 = ф (X) я5 -f иЩ, (13-18) I v = . Здесь от и зависит только второе слагаемое, цоэтому четом (13-17) максимум Н будет при и и ар sign Н = С/пр sign ] (13-19) 1 = 1 -Отсюда следует, что U все время имеет свою предельную величину р. Таким образом, релейный характер оптимального по быстро-управления справедлив для общего случая нелинейпого тьекта, описываемого уравнением (13-16). .1
|