
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления тоже заимствованы из теории САУ непрерывного действия. В частности, и здесь широко применяется синтез на базе логарифмических частотных характеристик. При этом для возможности применения методики синтеза непрерывных САУ удобно испо.т[ь-зовать подстановку (12-40) [27]. Построение переходных процессов в импульсных САУ осуп],ествляется путем решения уравнения (12-26) описанным выше образом с использованием таблиц дискретного преобразования Лапласа или графически с помощью методов, описанных в § 6-2, и в том числе по частотной характеристике системы (метод трапецеидальных характеристик). Здесь есть только одна особенность по сравнению с САУ непрерывного действия - в результате построения находится не действительная
10=0 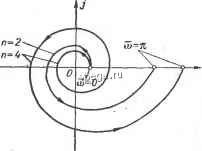 Рис. 12-11. Критерий устойчивости Найквиста для импульсной системы. Рнс. 12-12. Критерий устойчивости Михайлова для импульсной системы. непрерывная выходная величина жцх (*)i а решетчатая функция вых [Ь Г- е. значения выходной величины в дискретные моменты времени через период J (см. рис. 12-6). Это цена упрощения математического описания импульсной системы путем перехода от непрерывных функций времени к решетчатым функциям. В тех случаях, когда требуется знание значений выходной величины в промежуточные моменты времени, т. е. внутри интервала может быть применено модифицированное дискретное преобразование Лапласа. Оно оперирует решетчатыми функциями, сдвинутыми относительно моментов t = пТ на фиксированный промежуток времени еТ, где значение е берется в диапазоне 0-1. Такая решетчатая функция обозначается х [п, е]. Пользуясь модифицированным дискретным преобразованием Лапласа, можно найти соответствующую дискретную передаточную функцию системы W% (z, е) и по ней кривую переходного процесса жых [п, е], определяющую значения выходной величины в моменты времени t = {п + г) Гц, т. е. в точках внутри интервалов квантования по времени. Ш Для модифицированного дискретного преобразования Лапласа ществуют формулы и таблицы, аналогичные формулам и таблицам I для простого преобразования Лапласа (см., например, [26; 16]). I Строя переходный процесс для нескольких значений е, прин-I циииально можно получить любое число точек реального непрерывного процесса x (О- Нелинейные импульсные системы исследуются с помощью об-npik методов исследования нелинейных САУ, рассмотренных во второй части книги. Коррекция импульсных систем может осуществляться с помощью обычных корректируюпщх звеньев непрерывного действия, вводимых в непрерывную часть системы, и с помощью корректирующих звеньев импульсного действия. Последние включаются после импульсного элемента, и, как корректирующие звенья непрерывного действия, они могут быть последовательными или параллельными. Импульсные корректи-руюпще звенья иногда называют импульсными фильтрами. Например, вместо пропорционально дифференцирующего корректирующего звена непрерывного действия в импульсной САУ может быть применено импульсное звено с соответствующей 1крискретной передаточной функцией. Получение сигнала но произ-РЩРьодной будет осуществляться при этом в виде сигнала по первой разности дискретных значений входного сигнала (см. рис. 127). Сортветствующее корректирующее звено должно запомнить очередное дискретное значение входного сигнала х [п] ш с поступлением следующего его значения х [п -f 1] выдавать на выходе дискретный сигнал разности Да; [nl = х [п + И -х [п], запоминая значение х [п -f 1]. f 12-4. ОПРЕДЕЛЕНИЕ И ОСОБЕННОСТИ ДИНАМИКИ ЦИФРОВЫХ СТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Определение цифровых систем автоматического управления В § 12-1 цифровыми системами были названы дискретные системы, в которых происходит квантование как но уровню, так и но времени. Более точно цифровые системы - это системы, в которых имеют место дискретные сигналы в виде цифрового кода. Цифровые, САУ - это наиболее совершенные по своим возможностям дискретные САУ. В них роль управляющего устройства играет цифровая вычислительная машина. Большинство цифровых САУ можно представить в виде схемы, показанной на рис. 12-13. Здесь НП - непрерывная часть системы; обычно это прежде всего объект управления; ЦВМ - цифровая вычислительная шина; Н - Ц и Ц - Н - соответственно преобразователи прерывной величины в цифровую и наоборот. Эти преобразователи связывают ЦВМ, у которой входная и выходная величины Представлены в цифровой форме, с непрерывной частью системы. -Зд ▼*не]  Преобразование непрерывной величины в цифровую заключается в квантовании ее по времени, по уровню и представлении полученных дискретных значений в виде чисел, т. е. в цифровом коде. В зависимости от принципа действия преобразователя это преобразование может осуществляться либо путем последовательного выполнения перечисленных выше этапов, либо сразу в виде одной операции. Такое преобразование называется к о д о -импульсной модуляцией. Поэтому цифровые системы иногда называют кодо-импульсными системами. Соответственно преобразование Н - Ц называют кодированием, а обратное .преобразование Ц - И - декодированием. В отличие от импульсной модуляции, применяемой в импу.льсных САУ, здесь каждое значение преобр;азуемой входной величины представляется не одним импульсом, модулируемый параметр которого (высота, ширина, фаза) пропорциона-  Рис. 12-13. Цифровая система автоматического управления. лен значению входной величины, а серией импульсов. Каждое численное значение входной величины представляется определенной комбинацией дискретных значений модулируемого параметра этих импульсов. Существуют различные цифровые коды. Простейший из них - единичный код. В этом случае каждое значение дискретной величины равным числовому значению кода дискретная величина представляется числом импульсов, величины. В случае десятичного - - выражается в виде десятичного числа и представляется серией импульсов, число которых равно числу разрядов этого числа. Каждый импульс несет информацию о цифре определенного разряда. Для этого модулируемый параметр импульса принимает одно из десяти дискретных значений. Наибольшее распространение получил двоичный код, соответствующий системе счисления с основанием 2. Каждый разряд двоичного числа может иметь только одно из двух значений: О или 1, и соответственно модулируемому параметру каждого импульса, предславляющего значение одного из разрядов, тоже придается одно из двух крайних значений. Знак величины передается с помощью отдельного импульса тоже с двумя возможными значениями модулируемого параметра [27; 28]. (В предельно простом случае, когда учитывается только знак входной величины, получается релейная двухпозиционная система с квантованием еще и по времени.) Преобразование непрерывной величины в цифровой код принципиально содержит погрешность из-за происходящего при зтом квантования по уровню, т. е. округления численного значения разуемой величины до целого числа, соответствующего J уровней квантования (см. рис. 11-1, г). Абсолютное значение хшностй квантования равно величине шага квантования. Шаг тования {д на рис. 11-1, г) - это приращение входной непре-ой величины X, соответствующее интервалу между двумя iMD- - уровнями квантования. Если дискретный (квантованный) сигнал определять числом : уровней, укладывающихся в текущем значении непрерывной величины X, то ошибка квантования будет положительной и JietaTb в пределах О - д. Ее можно уменьшить вдвое, если дискрет-вые значения определять ближайшим уровнем квантования, т. е. округлять их до следующего уровня, если входная величина переходит за середину очередного шага квантования. В этом случае ошибка квантования будет лежать в пределах ±ql2. Для осуществления такого квантова-Пя выполняющее его устрой-ю должно иметь статическую актеристику, показанную на 12-14. Очевидно, что уст-10, квантующее числом фойденных уровней, будет осуществлять квантование до [шжайшего уровня, если ко годному сигна.чу X добавить ;ающий сигнал ql2, равный :овине шага квантования. Во всех цифровых САУ преобразование непрерывной величины >1ИЯ В1 ство д тараш рис. 1 ройств Войде я 1,5q2,5g3.5q -2q -3q Рис. 12-14. Статическая характеристика квантователя преобразователя Н-Ц  ---г-х------- цифровую осуществляется путем квантования с округлением ближайшего уровня. Преобразователь Ц-Н цифровой величины в непрерывную пре-разует выходной сигнал ЦВМ в ступенчатую функцию У{пТц), ---JTopaH изменяется скачком в моменты пТ, а в промежутке между этими моментами сохраняется неизменной или изменяется по определенному экстраполяционному закону (линейно, квадратич-и т. п.). Таким образом, сигнал Y{nT ) подобен кванто-ому по уровню сигналу с АИМ при у = 1 (см. рис. 12-13). Основные достоинства цифровых САУ опреде- ----тся теми возможностями, которые возникают в результате №рпменения цифровой техники. Это прежде всего высокая точность, рэмехозащищенность и возможность реализации очень сложных Вигоритмов управления, какие только доступны современным pBM. Кроме того, к цифровым САУ в полной мере относится В такое достоинство импульсных систем, как возможность осу-рествления многоточечного управления (см. § 12-1). Высокая точность цифровых систем объясняется цифровой рмой представления в ней перерабатываемой управляющим Е. И, Юревич устройством информации. Точность всех операций при этом практически не имеет предела и определяется числом разрядов цифрового кода, которым представлены сигналы. Как известно, каждая операция над непрерывной величиной ведет к уменьшению точности. В отличие от этого переработка цифровых сигналов не ведет к увеличению погрешности, которая остается ограниченной заранее известным значением. Помехозащищенность цифровых систем выше, чем у импульс-пых, благодаря кодовому представлению информации. Во-первых, в этом случае изменение модулируемого параметра импульсов в определенных пределах, определяемых шагом квантования, не создает погрешности. Во-вторых, помехозащищенность может быть увеличена практически неограниченно за счет введения избыточности, позволяющей автоматически обнаруживать и исправлять возможные ошибки и искажения, возникающие при передаче и переработке цифровой информации. Разумеется, все эти достоинства цифровых систем достигаются ценой значительно большей их сложности и стоимости но сравнению с другими системами. Поэтому цифровые САУ применяются только в тех случаях, когда иными, более простыми средствами задача решена быть не может. Так, цифровыми делаются даже очень простые по алгоритму работы системы управления и регулирования, если от них требуется достаточно большая точность. Например, существуют цифровые системы программного регулирования с цифровым задатчиком программы, цифровые следящие системы с цифровыми измерителями рассогласования и шаговыми исполнительными двигателями или другими исполнительными органами дискретного действия. Широко применяются цифровые регуляторы, особенно интегрального типа, в которых цифровое представление регулируемой величины позволяет осуществить интегрирование с любой степенью точности. Однако основная область применения цифровых систем - это системы с достаточно сложным алгоритмом преобразования информации в управляющем устройстве, требующим применения ЦВМ. В этом случае в состав управляющего устройства могут входить ЦВМ вплоть до больших машин универсального тина и даже комплекса таких машин. Примерами таких цифровых САУ являются системы управления судами, самолетами и ракетами с помощью малогабаритных бортовых ЦВМ, систеьш централизованного автоматического управления химическими и другими производствами, включая домны, целые заводы, энергосистемы. В таких системах количество входных и выходных величин объекта управления может измеряться сотнями, а расстояния, на которые передаются эти величины, - многими километрами, а в отдельных случаях и тысячами километров. Область применения цифровых систем в настоящее время быстро расширяется по мере совершенствования цифровой техники и прежде всего повышения надежности и снижения веса ЦВМ. Особенности динамики цифровых систем автоматического пения I Наличие в цифровой системе квантования по уровню делает I *ее принципиально нелинейной, как и систему релейного действия. 1ь>я этом, как и в релейных САУ, в цифровых системах возможна стойчивость в малом с установлением автоколебаний, амплитуда Которых определяется зоной нечувствительности системы, равной Кагу квантования. Правда, поскольку шаг квантования в цифровых САУ обычно мал, возможная амплитуда таких автоколебаний хоже достаточно мала. Статическая точность цифровой САУ определяется шагом квантования, минимальная величина которого ограничена точностью измерения выходных величин объекта, а также возможной точностью преобразования их в цифровую форму. При уменьшении шага квантования q, т. е. при увеличении числа уровней квантования и числа разрядов цифрового кода, цифровая система приближается по своим свойствам к импульсной системе. При достаточной малости шага квантования q квантованием но уровню можно пренебречь и приближенно рассматривать цифровую систему как импульсную систему. Такая импульсная система * (получаемая из цифровой при q -* 0) называется предельной импульснойсистемой. Особенностью динамики цифровых САУ по сравнению с им-,пульсными является обязательное наличие фиксированного вре-* менного запаздывания в управляющем устройстве, определяемого длительностью одного цикла переработки информации в ЦВМ. § 12-й. МЕТОДЫ ИССЛЕДОВАНИЯ ЦИФРОВЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Математическое описание цифровых САУ осуществляется, как и импульсных САУ, с помощью разностных уравнений й дискретного преобразования Лапласа путем предварительной замены действующих в непрерывной части системы непрерывных величин фиктивными дискретными в виде решетчатых функций. Однако в связи с тем, что в отличие от импульсных систем в цифровых САУ имеется квантование по уровню, структурная схема цифровой САУ принимает вид, показанный на ис. 12-15, а. Здесь преобразователь Н - Ц представлен идеаль-:м импульсным элементом ИЭ с квантователем К, который [вляется нелинейным звеном со статической характеристикой, юбраженной на рис. 12-14. Преобразователь Ц - Н представлен -кантователем iifj, статическая характеристика которого является Многоступенчатой релейной характеристикой, по числу ступенек в общем случае отличающейся от характеристики квантователя К, идеальным импульсным элементом ИЭ и формирующим элемен-ФЭ. Два последних элемента преобразуют решетчатую .том 
|