
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления в установившемся режиме ток возбуждения генератора колеблется относительно некоторого среднего значения, определяющего среднее значение напряжения генератора. Благодаря инерционности цепей генератора колебание его напряжения относительно среднего значения невелико, но, разумеется, оно должно быть достаточным для обеспечения режима периодического срабатывания и отпускания реле. Всякое возмущение, например изменение нагрузки генератора, приводит к временному отклонению напряжения генератора от его установившегося значения и соответственно к длительной остановке реле в одном из своих крайних положений. После восстановления напряжения устанавливается новый устойчивый режим вибраций реле, однако с другой скважностью импульсов тока возбуждения и соответственно с другим средним значением этого тока. Описанный регулятор напряжения называется вибрационным регулятором. Он широко применяется для регулирования напряжения генераторов небольшой * мощности (например, в автомобилях). Б случае генераторов большей мощности в цепь возбуждения генератора включают контакты не самого чувствительного реле Р, а промежуточного более мощного реле или контактора. Б случае регулирования напряжения еще более мощных генераторов в схему вводится в качестве усилителя мощности возбудитель, т. е. вспомогательный генератор постоянного тока, работающий на обмотку возбуждения основного генератора и управляемый описанным вибрационным регулятором, реле Р которого подключается на зажимы основного генератора. Релейными часто делаются автопилоты самолетов и системы управления космическими объектами. Основными достоинствами релейных САУ являются их простота, связанная с ней высокая надежность, а также экономичность в расходе энергии питания. Именно этим обусловлено, в частности, широкое применение релейных систем в летательных аппаратах, особенно космических. Простота релейных систем объясняется тем, что устройства релейного действия, как правило, значительно проще устройств непрерывного пропорционального действия. (Чтобы убедиться в этом, достаточно сравнить двигатель с пропорциональным управлением и двигатель постоянной скорости, линейный усилитель и реле с одинаковой выходной мощностью, какой-либо чувствительный элемент с линейной статической характеристикой и его же вариант- й релейном исполнений, контролирующий несколько дискретных значений входной величины.) Экономичность релейных систем можно продемонстрировать сравнением к. н. д. линейного усилителя и усилителя, выполненного на тех же элементах, но работающих в релейном (ключевом) режиме. Кроме того, благодаря тому, что релейные элементы осуществляют предельную форсировку выходного сигнала, релейные САУ воляют осуществить максимально возможное быстродействие этом отношении превосходят САУ непрерывного действия I. тринадцатую главу). Релейные элементы подразделяются по числу уровней выходной величины на двухпозиционные, трехпозиционные и т. д. При-шером первых,двух типов релейных элементов являются соответ-внно двух- и трехпозиционные поляризованные реле. Приме-многопозиционного релейного элемента служит управляемое ропротивление, имеющее конечный ряд дискретных значений. 1ростейшим таким элементом является многонозиционный невключатель сопротивления.) Основное применение в релейных САУ получили двух- и трехпозиционные релейные элементы. По тину релейных элементов нейные САУ называются двухнозиционными, трехнозиционными г. д. Многонозиционное квантование по уровню применяется Главным образом в цифровых САУ (см. двенадцатую главу). 11-3. ОСОБЕННОСТИ ДИНАМИКИ РЕЛЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Начнем с двухнозиционных релейных САУ. 1а рис. 11-4, а изображена типовая статическая характеристика вухпозиционного релейного элемента такой системы (пунктир !Т&твует идеальному двухиозиционному релейному элементу), hAsJhc. 11-4, б показан саракЦр переходного процесса в рассматриваемой У. Кк видно, нереход-ш npoitecc сводится к ленению скважности вы-ходных импульсов релей-аого элемента. Примером вухнозиционной релей-юй САУ является они-анная выше вибрацион-1ая система регулирова-нанряжения. Первая особе н-с т ь двухнозицион-релейных САУ заклю-в отсутствии у них атического режима. По-скольку выходная величина двухнозиционного релейного элемента f может принимать только одно из двух предельных значений, един-1ственно возможным установившимся невозмущенным режимом f в таких системах являются автоколебания. Точность двухпозици-рнных релейных САУ в установившемся режиме определяется, Вким образом, средним значением выходной величины и 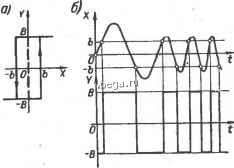 Рис. 11-4. Переходный процесс в двухпо-зиционной системе автоматического управ-* ления. амплитудой установившихся автоколебаний относительно этого среднего значения. Величина этой амплитуды зависит от частоты автоколебаний и в соответствии с частотной характеристикой непрерывной части системы, являющейся фильтром нижних частот, принципиально может быть сделана сколь угодно малой путем повышения частоты автоколебаний. Вторая особенность динамики релейных САУ - возможность получения эффекта вибрационной линеаризации путем создания достаточно высокочастотных колебаний на входе релейного
\0 ХХо элемента. В этом случае релейный элемент линеаризуется, и поэтому вся система в целом ведет себя как система непрерывного действия. Эффект вибрационной линеаризации был описан с помощью метода гармонической линеаризации в § 9-3, п. F. Как там отмечено, он также аналогичен рассмотренному в § 8-3 эффекту линеаризации нелинейного звена высоко-частотньш случайным сигналом. Сущность вибрационной линеаризации применительно к релейному нелинейному звену иллюстрирует рис. 11-5. На рис. 11-5 приведено построение сигнала на выходе реле для чисто переменного входного сигнала и для суммы этого переменного сигнала и постоянного сигнала Xq. В первом случае выходной сигнал хюлучается тоже чисто переменным Y, а во втором случае вследствие изменения скважности выходных импульсов в выходном сигнале появляется постоянная составляющая Yq, величина которой зависит от величины постоянной составляющей Xq на входе реле. Соответствующая зависимость Yq от Xq показана на рис. 11-5, б. Форма этой зависимости определяется формой входного переменного сигнала и релейной характеристикой. Таким образом, при наличии неременного воздействия Х на входе релейного элемента этот элемент пропускает постоянный (точнее, низкочастотный по сравнению с переменным высокочастотным сигналом Х) сигнал Xq как звено непрерывного действия. При этом для малых величин последнего сигнала звено является линейным. 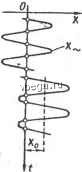 Рпс. 11-5. К идее вибрационной линеаризации. Процесс вибрационной линеаризации можно трактовать как процесс модуляции, где релейный элемент является модулятором, высокочастотное воздействие Х - несущей частотой, а входной низкочастотный сигнал Хо - модулирующим сигналом. В данном случае имеет место широтно-импульсная модуляция, когда функцией модулирующего сигнала является ширина выходных импульсов (см. § 12-1). Отсюда вытекает следующее условие неискаженной передачи низкочастотной составляющей релейным элементом [25J: (И-1) где /- и /о - соответственно частоты высокочастотного и низкочастотного входных сигналов. При работе релейного элемента в составе САУ низкочастотный сигнал Хо представляет собой сигнал управления, т. ё. изменение его во времени и есть переходный процесс в системе. Высокочастотное воздействие, осуществляющее вибрационную линеаризацию, может быть получено тремя способами: с помощью внешнего генератора, создающего вынужденные колебания системы, путем автоколебаний в самой САУ и, наконец, путем создания скользящего режима. Применение внешнего генератора позволяет наиболее просто выбирать частоту и амплитуду высокочастотных колебаний систе-гГбычно наиболее выгодно зти колебания подавать непосред-jneHHO на сам релейный элемент. При этом в случае достаточно высокой частоты вынужденных колебаний зти колебания прак-чески будут существовать только в этом элементе, не проходя дальше в систему вследствие инерционности последующих звеньев. Недостатком этого способа вибрационной линеаризййии является необходимость в специальном генераторе колебаний. Поскольку в двухпозийионной релейной САУ при отсутствии внешнего высокочастотного воздействия всегда существуют автоколебания, то установление вынужденного высокочастотного колебательного режима происходит в результате подавления этих автоколебаний. Такой режим называется режимом захватывания. Использование автоколебаний для осуществления вибрационной линеаризации требует обычно принятия специальных мер для повышения частоты автоколебаний до нужного значения. Для этой цели применяются обычные средства коррекции, повышающие быстродействие Системы (см. седьмую главу). Примером систем, в которых используется вибрационная линеаризация автоколебаниями, являются так называемые вибрационные системы автоматического регулирования. К их числу относится и описанная выше вибрационная система регулирования напряжения генератора. Вариантом рассмотренного второго способа осуществления вибрационной линеаризации является создание с помощью местной 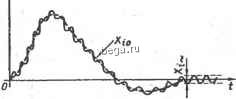 обратной СВЯЗИ вокруг релейного элемента автоколебательного контура. Такой контур можно рассматривать так же, как генератор вынужденных высокочастотных колебаний, встроенный в саму систему, т. е. выполненный на базе самого релейного элемента этой системы. Типовой схемой такого автоколебательного контура является охват релейного элемента отрицательной инерционной жесткой обратной связью [111. Третьим способом осуществления вибрационной линеаризации является создание скользящего режима, который был описан с помощью фазовой плоскости в § 8-5. Скользящий режим может существовать либо в течение всего переходного процесса, либо возникать только в его конце. При наличии в системе вибрационной линеаризации высокочастотные колебания линеаризуют не только релейный элемент, но и другие нелинейности >г,- * (зоны нечувствительности, неоднозначности и т. д.), имеющиеся в системе (см. § 9-3, п. Г). Как уже говорилось, при наличии вибрационной линеаризации переходные процессы в релейной САУ подобны процессам в системах непрерывного действия. При зтом высокочастотные колебания, вызывающие линеаризацию, образуют высокочастотный фон, накладывающийся на переходный процесс подобно высокочастотной помехе в обычной системе непрерывного действия. Последнее иллюстрируется на рис. 11-6, где показан переходный процесс для интересующей нас некоторой промежуточной переменной непрерывной части системы. (Ею может быть, например, напряжение генератора в схеме на рис. 11-3.) Точность релейных САУ в установившихся режимах при наличии вибрационной линеаризации выше, чем при ее отсутствии, вследствие того, что в последнем случае в двухнозиционных системах будут существовать низкочастотные автоколебания значительно большей амплитуды. Тот факт, что при вибрационной линеаризации релейные САУ приближаются но качеству переходных процессов к системам непрерывного действия, отнюдь не означает, что такие релейные системы во всех случаях обеспечивают более высокое качество переходных процессов, чем релейные САУ без вибрационной линеаризации. В тринадцатой главе будет показано, что при определенных условиях наилучшее качество переходных процессов обеспечивается именно при чисто релейном управлении. Поэтому, например, в САУ непрерывного действия часто вводят сне- Рис. 11-6. Переходный процесс, в релейной системе прп наличии вибрационной лине-арпзации.  яальные приставки, осуществляющие релейное управление объ-ктом при больших отклонениях от заданного режима, за счет жВГО достигается снижение максимального отклонения управляемой величины и повышается быстродействие. Обратимся теперь к трехпоэиционным релей-ы ы САУ. В этом случае характеристика релейного элемента {характеристики 6 и 7 в приложении 5) имеет зону нечувствитель-юсти. Благодаря этому в таких системах принципиально возложен статический режим покоя без автоколебаний, когда вели-нна на входе X релейного элемента находится в зоне нечувстви-ьносщ и соответственно его выходная величина У = 0. Для ализации такого режима, когда он желателен,.в непрерывную асть системы вводят коррекцию, которую выбирают но условию сутствия в системе автоколебаний. В остальном, включая ре-вибрационной линеаризации, все изложенное вьшге оста-ся в силе и для этих систем. 11-4. МЕТОДЫ ИССЛЕДОВАНИЯ РЕЛЕЙНЫХ СИСТЕМ 5Т0МАТИЧЕСК0Г0 УПРАВЛЕНИЯ Общий порядок исследования релейных САУ как при анализе, так и при синтезе, тот же, что и для САУ непрерывного действия. Он включает математическое описание системы, исследование точности, устойчивости, качества переходных процессов и, нако-;ец, построение переходных процессов. Об особенностях математического онисания елинейных систем говорилось в § 8-1. В результате составляется структурная схема системы, состоя-,ая из непрерывной части и релейного емента с внешним воздействием, нри-нным в произвольной точке не-ерывной части (см. рис. 11-2). Если асток непрерывной части между ме-стом приложения внешнего воздействия и входом релейного элемента является линейным, это воздействие переносится на вход релейного элемента. В результате схема САУ принимает типовой вид (рис. 11-7). Релейный элемент описывается Статической характеристикой и временем запаздывания. Время запаздывания определяется по времени срабатывания и времени отпускания релейного элемента [23], которые в общем случае Могут быть различными. Запаздывание релейного элемента учитывается введением в структурную схему системы звена с постоянным запаздыванием (см. § 1-4, п. Е), которое включается в непрерывную часть системы. Рис. 11-7. Перенос внешнего воздействия F на вход релейного элемента через участок с передаточной функцией Wp (р).
|