
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Продифференцировав это равенство, получим cos {ил - 4-. а Awa Подставив эти выражения для sin tOa* и cos ооа в (9-11), будем иметь Г = Уо + (/Сг-нр)х. (9-13) Здесь введены обозначения (9-14) Дифференциальное уравнение (9-13) справедливо для синусоидального входного сигнала (9-10) и определяет выходной сигнал нелинейного звена без учета высших гармоник. Постоянная составляющая У(, и коэффициенты ъкв соответствии с выражениями (9-12) для коэффициентов Фурье являются функциями амплитуды А и частоты ©а автоколебаний на входе нелинейного звена. При фиксированных А и (Оа уравнение (9-13) является линейным. Таким образом, если отбросить высшие гармоники, то для фиксированного гармонического сигнала исходное нелинейное звено может быть заменено эквивалентным линейным, описываемым уравнением (9-13). Эта замена и называется гармонической линеаризацией. Соответственно коффициенты ftp и ft, называются коэффициентами гармонической линеаризации или гармоническими коэффициентами передачи. Эти f коэффициенты определяются нелинейностью ф(Х) и значениями/1 и Юа по формулам (9-12). В приложении 6 приведены вычисленные по этим формулам готовые выражения для Уд, кг и ftp рдя ряда типовых нелинейных звеньев. Для этих и вообще всех безынерционных нелинейных звеньев величины Уд, кг и кг являются функциями только амплитуды Л и не зависят от (Оа- Постоянная составляющая У, согласно (9-12), появляется в уравнении (9-13) только в случае нелинейностей, несимметричных относительно начала координат (в приложении 6 это нелинейности 8, 9, 10, 11); В этом случае имеет место эффект выпрямления чисто переменного сигнала. При симметричной относительно начала координат, т. е. нечетной, характеристике ф (X) постоянная составляющая У = О и уравнение (9-13) принимает вид: (9-15) (9-15а) пе Инл (р) = ftp + 5 Р ~ передаточная 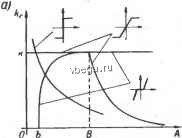 функция эквивалентного линейного звена, которую можно назвать гармоничес-кой передаточной функцией нелинейного звена. В соответствии с (9-13) и (9-14) коэффициент кг определяет выходную гармоническую составляющую, совпадающую по фазе с Твходным гармоническим сигналом, а кб&ффициент ftp - выходную составляющую, сдвинутую по фазе относительно шсодйрго сигнала на л/2 вперед или /назад в аависимости от знака-Дг, т. е. зна- : ка Са- \ Коэффициент кг 1появляется в уравнении (9-13) только в случае {неоднозначных характеристик tip (X) (в приложении 6 это нели--нейности 3, 5, 7). Неоднозначность характеристики приводит к тому, что при изменении знака входного сигнала происходит запаздывание в изменении выходного сигнала в связи с переходом на другую ветвь характеристики ф (X). В результате при гармоническом входном воздействии возникает запаздывание по фазе первой гармоники на выходе относительно входного сигнала. Йоэтому в данном случае в выражении (9-11) коэффициент при косинусоидальной составляющей не равен нулю и отрицателен. Соответственно отрицательным получится и ftp в уравнении (9-13). В случае безынерционной однозначной нелинейности первая гармоника на выходе нелинейного звена обязательно совпадает по фазе с входным сигналом (см., например, рис. 9-8). Поэтому уравнение (9-13) принимает вид: YY,{A) + kAA)X. . (9-16) При нечетной однозначной характеристике это уравнение пре-де.чьно упрощается: Y = kp{A)X. (9-17) В (9-16) и (9-17) *в скобках показано, что величины У и К являются функциями А. На рис. 9-9, я и б в качестве примера приведены графики кг{А) и К{А) для трех нечетных нелинейностей, построенные по 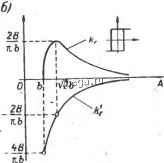 Рис. 9-9. Графики коэффициентов гармонической линеаризации. формулам приложения 6. Эти графики имеют ясный физический смысл, и их можно получить экспериментально подобно частотным характеристикам. Во всех случаях, когда характеристика нелинейного звена имеет насыщение, коэффициенты гармонической линеаризации стремятся к нулю при А -* оо, поскольку при этом амплитуда выходного сигнала остается ограниченной. Если характеристика имеет зону нечувствительности, наоборот, влияние нелинейности падает-с ростом А и коэффийиевт стремится к значению коэффициента передачи к линейного участка характеристики. При неоднозначной релейной характеристике влияние неоднозначности проявляется в запаздывании по фазе, и соответственно величина коэффициента kj, уменьшается по мере увеличения А по сравнению с шириной петли. В общем случае автоколебания ьогут быть несимметричнылт, т. е. содержать постоянную составляющую. Тогда колебания на входе нелинейного звена следует искать в виде: Х = Хо +Л sintOgf, (9-18) где Xq - постоянная составляющая X. В этом случае коэффициенты Фурье (9-12) и, следовательно, значения Уд, к тл к ъ уравнении (9-13) оказываются функциями уже трех величин: Юа, Л и Хц. Наличие постоянной составляющей на входе нелинейного звена приводит к тому, что постоянная составляющая Уд появляется и в случае нечетных характеристик. При этом для этих нелинейностей уравнение (9-13) удобно представить в виде: . Y = k X,+ {hr + %p){X-X,),. (9-19) где fcro = YulXf - коэффициент передачи постоянной составляющей автоколебаний. При изучении гармонической линеаризации уместно вспомнить о рассмотренной ранее в восьмой главе статистической линеаризации. При статистической линеаризации нелинейное звено заменяется линейным, эквивалентным для постоянной составляющей входного сигнала и приближенно эквивалентным для его случайной составляющей. При этом в отношении последней составляющей приближенно принимается, что входной сигнал имеет нормальное распределение, и пренебрегается. его искажением в результате прохождения через нелинейное звено. В частотном аспекте это означает, что спектр случайного сигнала принимается неизменным. При гармонической линеаризации нелинейное звено заменяется линейным, эквивалентным для постоянной составляющей входного сигнала и приближенно эквивалентным для его колебательной составляющей. При этом приближенно принимается, что спектр колебательной составляющей входного сигнала состоит из одной гармоники, и пренебрегается ее искажением в нелинейном звене. 1.б. Методика исследования автоколебаний с помоиц>ю кгарионической линеаризации Рассмотрим замкнутую САУ, изображенную на рис. 9-7, а. 1аша задача - найти - параметры возможных автоколебаний в определенной точке системы. Первым этапом рещения яв.ляется осуществление гармонической линеаризации и(с еипомощью определение параметров возмож-ных автоколебаний на входе нелинейного звена. Рассмотрим вначале более простой случай, когда отыскива-,1Й1СЯ автоколебаш1я tf виде: X = Л sin Wst, г. е.. без постоянной составляющей. Это будет, если нелинейное авено имеет нечетную характеристику и нет внешнего постоянного Гвоздействия, создающего Хр. Применив гармоническую линеари-ацию, заменим нелинейное звено линейным, описываемым урав-Гнением (9-15а): результате получим линейную САУ с передаточной функцией W(p)=WAp)WM- (9-20) В ходящие в Инп(Р) величины kj.{A, (Оа) и /сг(Л, (Оа) выражаем как нелинейные функции искомых неизвестных Л и Оа- В случае типовых нелинейностей используем готовые формулы приложения 6. Заметим еще раз, что получаемая система яв.ляется линейной \- только нри фиксированных величинах А и (Од. При их изменении система по-прежнему нелинейна, так как содержит коэффициенты р. Аг и Аг, являющиеся функциями этих величин. Искомые значения параметров А и Юа.. входящих в передаточную функцию (9-20) линейной САУ, соответствуют наличию в этой L системе незатухающих колебаний, т. е. нахождению ее на границе устойчивости из-за наличия у характеристического уравнения ;пары сопряженных мнимых корней. Иными словами, значения А и (Оа могут быть найдены с помощью известных критериев устойчивости линейных систем как значения варьируемых параметров, ..При которых система оказывается на границе устойчивости, срот t ветствующей незатухающим колебаниям. Таким образом, дело сводится к применению известных- мето-дов определения границы устойчивости линейных систем (см. 4-5). V Условие на.чичия у характеристического уравнения мнимых корней по критерию Гурвица сводится к равенству где Д 1 - предпоследпий минор определителя Гурвица, составленного из коэффициентов левой части D (р) уравнения замкнутой системы. Левая часть D{p), как известно, равна сумме числителя и знаменателя передаточной функции--Щр). По критерию Найквиста то же условие имеет вид: И(/(й) = -1, т. е. с учетом (9-20) Ил(/со)И л(/ ) = -1- (9-21) Из критерия Михайлова это условие получаем в виде: Z)(/(o) = 0. - (9-22) Выбор того или иного критерия устойчивости для нахождения значений А и Юд зависит от конкретной схемы системы и определяется общими рекомендациями, данными в § 4-5. В результате находятся параметры возможных автоколебаний в системе, например, в виде зависимости Aia)- Если при синтезе САУ требуется исследовать зависимость автоколебаний от какого-либо параметра системы, получаются уже три неизвестных параметра и решение находится в виде зависимостей Л и Ша от варьируемого параметра системы.- Примером для этого случая может служить зависимость А от коэффициента передачи к линейной части системы, изображенная на рис. 9-6. (Она должна быть дополнена еще зависимостью.соа от А;). В случае двух варьируемых параметров системы решение получается в виде линий, фиксированных значений Л и (Оа в п.чоскости этих параметров. Нелинейный характер зависимостей входящих в Wan{p) коэффициентов кг и кг гармонической линеаризации от Л и tOg делает задачу нахождения искомых значений 4 и соа значительно более сложной, чем в случае определения границ устойчивости линейных систем. Поэтому обычно прибегают к методу последовательных приближений и.чи графическим методам (как и в случае решения аналогичных уравнений при статистической линеаризации). В частности, при использовании уравнения (9-21) можно рекомендовать следующий способ, предложенный С. Л. Го.чьдфар-бом. В комплексной плоскости строятся годограф Wn(/ft>)) т. е. а. ф. ч. X. линейной части, и годограф - -(Щ этом значения А указываются как параметр на текущих точках последнего годографа. В соответствии с (9-21) точки пересечения годо-грдфов определяют искомые значения амплитуды А и частоты (Оа автоколебаний. Можно, наоборот, находить точку пересечения годографов ту и - Иш1(7(о), как предложил Коченбургер. При применении логарифмического критерия устойчивости условие (9-21) принимает вид: л( )-Ь л( ) = 0; (9-23) В этом случае строится серия л. а. х. и л. ф. х. системы для . ряда значений А. Искомыми значениями А будут те, при которых л. ф- X. пересечет уровень - л на частоте среза. В свою очередь, -частота среза определяет значение частоты сОд. В тех случаях, когда входящие в Инл коэффициенты к и к достаточно сложй(Г~ависят от Л и (Од, так что вычислить Инл по Л и (Оа затруднительно, рекомендуется следующий способ. На основе (9-21)лй (9-22) находятся сперва зависимости /Сг((о) и й;((о). Затем бефтся зависимости кг{А, (Оа), kJAyta), определяемые по (9-14) или из щриложения6,исовместнос первыми зависимостями графическим решением находятся значения А и (Oai удовлетворяющие обеим парам зависимостей. При этом приравнивается (о = (Оа. Наконец, в наиболее сложных случаях приходится прибегать к методу последовательных приближений. Например, при применении усповия (9-22) по критерию Михайлова задаются последовательно рядом значений А и, строя каждый раз годограф DQai), ищут значение А, при котором годограф пройдет через начало координат. После того как найдены возможные автоколебательные режимы, необходимо исследовать их на устойчивость. Реально существовать в системе могут только устойчивые автоколебания. Для ис следования устойчивости осуществ.чяют линеаризацию системы переходом к приращениям относительно рассматриваемого автоколебательного режима и применяют обычные критерии устойчивости .чинейных САУ. Существуют также более простые необходимые критерии устойчивости автоколебаний [18]. Часто вопрос об устойчивости автоколебаний оказывается ясным и из чисто физических соображений. Наконец, как уже отмечалось, необходимо осуществить проверку гипотезы о том, что линейная часть системы в достаточной мере является фильтром нижних частот д.чя найденных зн81.чений частоты (Оа автоко.чебаний. В резу.чьтате применения гармонической линеаризации определяются значения амплитуды А автоколебаний на входе не.чинейного звена. Если нам надо знать амплитуду ко.чебании в другом месте системы, ее легко найти обычным путем по а. ч. х. участка линейной части системы, заключенного между входом не.чинейного звена и интересующим нас местом системы. До сих пор мы предполагали, что САУ содержит одну нелинейность. Однако описанная методика принципиально применима и к системам, имеющим несколько нелинейностей, разделенных линейными звеньями. ТТри этом, если эти .линейные звенья являются фильтрами нижних частот, то каждая из нелинейностей линеаризуется порознь. В противном случае эти не.чинейности вместе с промежуточными линейными звеньями рассматриваются как одна сложная нелинейность. Рассмотрим пример применения метода гармонической линеаризации для исследования условий устойчивости и автоколебаний
|