
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Трудности точного исследования нелинейных систем привели к разработке, во-первых, методов, дающих достаточны е критерии устойчивости, т. е. критерии, позволяющие определить часть полной области устойчивости системы, и, во-вторых, приближенных методов исследования. В первом случае нам заранее известен знак погрешности в определении предела устойчивости - предел всегда будет занижен, т. е. погрешность идет в запас устойчивости. Однако величина этой погрешности неизвестна и может быть сколь угодно большой. Во втором случае знак погрешности неизвестен, но зато часто имеется возможность как-то оценить сверху абсолютную величину погрешности. В настоящей главе рассмотрим вначале наиболее общие методы исследования устойчивости нелинейных систем А. М. Ляпунова, составляющие основу теории устойчивости. Затем будут изложены представляющие большой практический интерес достаточный критерий устойчивости В. М. Попова и метод гармонической линеаризации в качестве метода приближенного исследования автоколебаний и устойчивости. В § 8-4 было дано понятие об устойчивости нелинейных систем с использованием фазового пространства. Впервые строгая теория устойчивости нелинейных систем была предложена в 1892 г. А. М. Ляпуновым, который дал такое определение устойчивости (устойчивость по Ляпунову): невозмущенное движение устойчиво, если при достаточно малых начальных возмущениях вызванное ими возмущенное движение сколь угодно мало отличается от невозмущенного; при этом движение асимптотически устойчиво, если при t -* оо возмущенное движение стремится к невозмущенному. Под невозмущенным движением Ляпунов понимал любой интересующий нас в отношении устойчивости режим системы. В фазовом пространстве, описанном в § 8-4, ему соответствовало начало координат. Этим режимом в общем случае может быть как установившийся статический или динамический режим, так и неустановившийся режим. В качестве возмущений А. М. Ляпунов рассматривал ненулевые начальные условия, соответствующие начальному смещению изображающей точки из начала координат в определенную точку фазового пространства при неизменных внешних воздействиях, соответствующих невозмущенному движению. Это практически неудобное ограничение. Однако можно показать, что при достаточно общих условиях режим, асимптотически устойчивый по Ляпунову, будет оставаться устойчивым и при включении в понятие возмущения отклонений внешних воздействий [15]. Ляпунов разработал два общих метода исследования нелинейных систем. Первый метод применим только для исследования устойчивости в малом линеаризуемых систем. (Методика линеаризации была описана в § 1-2.) Поскольку к таким системам полностью применима описанная в первой части книги линейная теория, включая и все существующие критерии устойчивости (см. главу четвертую), не будем останавливаться на этом методе. Отметим только, что при этом Ляпунов впервые доказал допус-Гтимость суждения об устойчивости в малом нелинейной системы Гпо устойчивости линейной системы, полученной путем линеаризации исходной нелинейной системы. Далее, он доказал также, что в критических случаях, когда линеаризованная система на- ходится на границе устойчивости, об устойчивости исходной не- линейной системы ничего нельзя сказать: она может быть устой-[чива или неустойчива в зависимости от конкретного вида нели- нейностей. Второй метод Ляпунова, называемый прямым методом, является наиболее общим методом исследования !устойчивости любых нелинейных систем. Он дает достаточные условия устойчивости, т. е. определяет часть области устойчивости. Идея метода проста и ее удобно объяснить с помощью фазового пространства (рис. 9-1). Рассмотрим в этом пространстве замкнутую поверхность произвольной формы, описываемую уравнением V{Xi,x,...,xJ = C: (9-1) 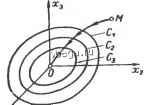 Здесь V{Xi, Х2, .... Хп) - функция ко- /i, ординат х, х, Хп, & С - параметр, определяющий величину функции. Каж- К прямому мето-дому его значению соответствует опре- япунова. деленная поверхность. С уменьшением С поверхность сжимается так, что поверхность, соответствующая меньшему. С, находится целиком внутри поверхностей, соответствующих большим С. При С 0 поверхность стягивается в начало координат. Предположим, нам известно, что при всех возможных траекториях движения изображающей точки М она все время движется только внутрь поверхности (9-1), т. е. переходит с Поверхности, соответствующей большему значению С функции V, на поверхность с меньшим значением функции V. Очевидно, что этот факт является достаточным признаком устойчивости системы, поскольку в этом случае все фазовые траектории должны неизбежно кончаться в начале координат. Аналитически такой характер движения изображающей точки означает, что вдоль фазовых траекторий производная dVldt функции V{Xi, х, а; ) отрицательна. На основании изложенного можно, пользуясь терминологией Ляпунова, сформулировать следующее достаточное условие устойчивости: если мояЬно указать такую знакоопределенную функцию V(Xi, х, х,, производная которой по временг dVldt, согласно дифференциальным уравнениям системы, тоже является анакоопределенной функцией, но противоположного знака, то возмущенное движение асимптотически устойчиво. Знакоопределенной функцией называется функция, которая нри всех значениях переменных имеет один знак, а в начале координат обращается в нуль. Если в приведенном определении ослабить требование к производной dVldt, допустив обращение ее в нуль и вне начала координат, получим соответственно более слабое условие устойчивости, включающее и неасимптотическую устойчивость. Действительно, в этом случае изображающая точка может застрять на определенной поверхности (9-1) с получением /df = G, не дойдя до начала координат. Сформулированное выше условие устойчивости составляет основу прямого метода Ляпунова. Он заключается в отыскании для исследуемой нелинейной системы функции V, удовлетворяющей указанному выше требованию. Такие функции называются функциямиЛяпунова. Смысл прямого метода Ляпунова состоит в том, что для определения знака производной dV Idt вдоль фазовых траекторий, которые определяются уравнениями системы, не требуется решать эти уравнения, а достаточно лишь представить их в форме Коши: (9-2) Выражение для первой производной dV/dt выбранной функции V{Xi, х ) содержит наряду с переменными первые производные этих переменных. Но эти производные определяются непосредственно из (9-2). Поэтому, подставив их в выражение dV/dt, получим последнее как функцию только самих переменных и параметров системы. Отсюда определяются границы изменения начальных значений переменных и значений параметров системы, нри которых dV/dt сохранит знакоопределенность, т. е. находятся условия устойчивости. Трудность применения прямого метода Ляпунова состоит в отсутствии общих правил отыскания функций Ляпунова. Здесь в значительной степени приходится рассчитывать на интуицию. Это, конечно, существенно ограничивает практическое применение данного метода. Большое значение для развития прямого метода Ляпунова имеют работы А. Ц. Лурье, который для целого класса нелинейных систем указал общий метод выбора функций Ляпунова [16; 17]. щ. Для иллюстрации идеи прямого метода Ляпунова рассмотрим Годин простой пример 115]. Пусть имеется система уравнений g = -(;r-P2/)(l-ax-V): =.-{y + ax){l-ax-by). (9-3) tpe о, Р, я и fc - положительные постоянные коэффициенты. 1редложим для этой системы следующую функцию: V = ax-\-fiyK (94) i)e производная = 2a.J4-b2p,. (9-4а) Подставив сюда выражения (9-3), получим 2 (1 -ах - б2/*) (аа: + у). 1роизводная dV/dt<0 при ах + Ьу<1- [Это. значит, что при выполнении условия (9-4а) функция (9-4) является функцией Ляпунова, т. е. условие (9-4а) представляет особой достаточное условие устойчивости системы. Границей устой-чивости в фазовой плоскости является, следовательно, неустойчивый предельный цикл в виде эллипса aa + by=i. В заключение подчеркнем еще раз, что прямой метод Ляпунова дает только достаточные условия устойчивости. Если для конкретной нелинейной системы удалось найти функцию Ляпунова и с ее помощью определить условия, т. е. границы устойчивости системы, то вне этих границ мы ничего не можем сказать об устойчивости системы. Иными словами, мы ничего не знаем о том, какая часть полной области устойчивости нами найдена. Это целиком зависит от того, насколько удачную функцию Ляпунова удалось найти. При этом, выбирая pa3Hj.ie функции Ляпунова, будем находить для одной и той же системы разные по величине участки полной области устойчивости. § 9-2. КРИТЕРИЙ АБСОЛЮТНОЙ УСТОЙЧИВОСТИ В. М. ПОПОВА Абсолютная устойчивость - это устойчивость в целом нелинейной системы нри задании ее нелинейностей принадлежностью к определенному классу. Под этим понимается задание нелинейности не конкретной характеристикой, а в более общем виде - с точностью только до определения ее класса. 1 Типичным случаем такого определения нелинейности, которое в дальнейшем и будем рассматривать, является задание статической нелинейной характеристики тем, что она должна находиться в определенном угле между осью абсцисс и некоторой прямой, как показано на рис. 9-2. При этом конкретная форма характеристики может быть любой, в том числе и непостоянной. При таком определении характеристики говорят, что характеристика задана в угле (О, к). Здесь О и А; - тангенсы углов наклона линий, ограничиваюпщх этот угол. При этом нуль соответствует оси абсцисс. Условия абсолютной устойчивости нелинейных систем исследованы в основном применительно к нелинейностям, заданным именно таким образом, т. е. в угле. Исследование устойчивости систем при таком неконкретном задании нелинейностей, т. е.
Рис. 9-2. К понятию абсолютной устойчивости. исследование абсолютной устойчивости, вызвано не только чисто математическими соображениями в смысле упрощения задачи, но имеет и практический смысл в тех случаях, когда нелинейности известны неточно или могут изменяться. Критерий абсолютной устойчивости В. М. Попова, предложенный в 1959 г., относится к системам, которые можно представить в виде схемы, приведенной на рис. 9-3, а. Она состоит из линейной части с передаточной функцией Wa{p) и безынерционного нелинейного звена НЛ. Характеристика ф(Х) этого звена является однозначной и лежит в угле (О, к) (см. рис. 9-2). Минус на входе Wij)) показывает, что обратная связь в системе отрицательна. Для определения устойчивости по этому критерию используется частотная характеристика WI (/со) = Re {/(л) + /со Im (/со). (9-5) Эта характеристика получается из а. ф. ч. х. W (j(i)) линейной части системы путем умножения ординат последней характеристики на текущее значение со (рис. 9-3, б). Рассмотрим вначале критерий В. М. Попова, когда линейная часть системы устойчива. В этом случае критерий заключается в следующем: система абсолютно устойчива, если при устойчивой линейной части системы через точку {-1/к, /0) можно провести хотя бы одну прямую линию так, чтобы вся характеристика находилась от нее справа. Такая линия называется линией Попова. На рис. 9-3, б показан пример, когда имеет место абсолютная устойчивость. В случае сплошной характеристики на рис. 9-3, в критерий абсолютной устойчивости не выполняется. Разумеется, тем более > он не выполняется, если характеристика Wnijai) охватывает точку \{-\1к, /0) (пунктир на рис. 9-3, в). Критерий В. М. Попова является достаточным, т. е. он дает [часть области абсолютной устойчивости и его невыполнение не розначает отсутствия абсолютной устойчивости. Представляет интерес сравнить условия абсолютной устойчи-[вости В. М. Попова с условиями устойчивости линейной системы, [получаемой при предположении, i,4TO характеристика ц>(Х) в угле (0, к) является линейной. Это Заначит, что нелинейное звено НЛ [заменяется идеальным линейным, звеном с коэффициентом передачи /со> лежащим в пределах to kfk. Передаточная функция для такой разомкнутой системы равна 1/соРл(р)- Согласно критерию Найквиста, условие устойчивости рассматриваемой линейной системы заключается в том, что а. ф. ч. х. \ка{]) не должна охватывать точку (-1, /0). Последнее эквивалентно условию, чтобы а. ф. ч. х. Ил(Усо) линейной части системы не охватывала точку (-1 с, /0). (Действительно, граница устойчи- вости по Найквисту соответствует равенству kJjiu) = -1, т. е. Ил(/< ) = -l/Zio-) При изменении величины в диапр-ог.и от О до к точка (-1 со. /0) перемещается по действительной оси от - оо до -1/0. Поэтому условием уетой-чивости линейной системы при /со = О /с является прохождение характеристики WJjiii) ?через действительную ось правее точки (-1/к, ]0), т. е. непересечение ею действительной оси левее этой точки. / Характеристики РлС/м) и Рл(/<а) имеют одинаковые действительные части и, следовательно, пересекают действительную ось в одних и тех же точках. Поэтому сформулированное условие устойчивости линейной системы полностью относится и к характе-ристцке FF(/co). Таким образом, достаточное условие устойчивости при произвольной форме однозначной нелинейной характеристики ф(Х) в угле (О, к) оказывается -строже необходимого и достаточного условия устойчивости в cj4ae линейной характеристики ф(Х) 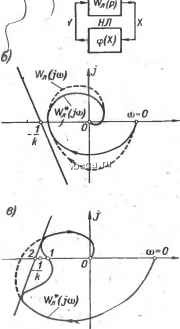 Рис. 9-3. Критерий абсолютной устойчивости В. М. Попова.
|
||||||||||