
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления 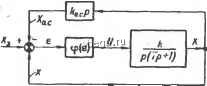 а в третьем случае (рис. 8-14, в) a; = ±fc. В последнем случае отрезок оси абсцисс между этими линиями представляет собой особый отрезок, определяющий зону застоя системы из-за нечувствительности реле. Справа от линий переключения фазовые траектории описываются уравнением (8-33) с = -- , слева - с фс = - В, а между линиями переключения (в случае трехпозиционного реле - рис. 8-14, в) - с Фс = 0. Построение фазовой траектории, начатое в произвольно выбранной точке с координатами х, -j/o, ведется по уравнению (8-33) при соответствующем значении ф вплоть до линии переключения. Здесь происходит изменение ф, т. е. переход к другому уравнению. В качестве начальных значений х и Уо для этого очередного участка траектории берутся конечные значения неременных предыдущего участка. При следующем переходе через линию переключения вновь изменяется ф и т. д. Фазовый портрет на рис. 8-14, а соответствует устойчивой в целом системе. (В случае такой двухнозиционной релейной системы в начале координат теоретически должны существовать автоколебания бесконечно малой амплитуды с бесконечно большой частотой - см. одиннадцатую главу.) На следующем фазовом портрете (рис. 8-14, б) имеется устойчивый предельный цикл и, следовательно, существует неустойчивость в малом. Физически последний факт очевиден. В данном случае двухпозиционное реле с зоной неоднозначности в отличие от такого же реле без этой зоны (рис. 8-14, а) не имеет состояния покоя при х = 0. Установившийся режим системы с таким реле представляет собой автоколебания относительно точки х = 0. Система с фазовым портретом на рис. 8-14, в устойчива в целом, но неасимптотически из-за наличия зоны нечувствительности у реле. Чтобы продемонстрировать, как может изменяться фазовый портрет системы при изменении ее схемы, рассмотрим систему, структурная схема которой приведена на рис. 8-15. Эта система отличается от предыдущей введением корректирующей гибкой (по скорости) обратной связи через дифференцирующее звено с передаточной функцией к-р. Дифференциальное уравнение фазовых траекторий получается таким: Г Ф< + су) (8-35) Рис. 8-15. Структурная схема нелинейной системы с гибкой обратной связью. В связи с введением на входе реле дополнительного сигнала по Производной в этом уравнении в отличие от уравнения (8-32) рункция ф определяется не только х, но и ее производной у. На рис. 8-16 показаны фазовые портреты данной системы при рвух вариантах релейной характеристики.- Уравнение линии переключения на рис. 8-16, а: (8-36) Переключение реле на следующем рис. 8-16, б происходит, когда X -\- ко.сУ = ±Ъ. Соответственно уравнения линий переключения здесь следующие: Ь - ко.сУ при 2/>0; - Ь - к ,у при у<0. (8-37) Введение дополнительного воздействия по скорости привело к наклону линий переключения, т. е. к зависимости значений х. 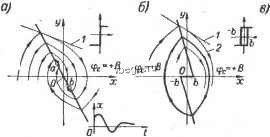 Рис. 8-16. Фазовые портреты системы, изображенной на рис. 8-15. [ при которых происходит переключение реле, от скорости х. (Направление наклона линий переключения определяется при этом [знаком сигнала по скорости, т. е. знаком обратной связи. Соответ-ртвенно при положительной обратной связи линии поверйутся противоположную сторону.) Сравнение рис. 8-16, а и 8-14, а показывает, что введение воздействия по производной привело к принципиально новому [типу переходного процесса. Колебательность процесса уменьши-лась, причем число колебаний стало конечным в связи с тем, что на линии переключения появился участок afc, к которому фазовые траектории подходят с обеих сторон, а отходящих траекторий нет. 1зображающая точка, попав на этот участок, движется по нему 1 начало координат со скоростью, определяемой текущей коорди-[натой у. В соответствии с уравнением (8-36) линии переключения (равнение движения при этом будет: (8-38) 215 Таким образом, вначале колебательный переходный процесс заканчивается апериодическим хвостом. (См. внизу справа на рис. 8-16, а.) Для пояснения причины появления участка аЬ на рис. 8-16, а показана касательная 1 к фазовой траектории в точке ее отхода от линии переключения. Чем ближе эта точка к началу координат, тем круче идет касательная. Когда ее наклон станет равным наклону линии переключения, изображающая точка пойдет по линии переключения, т. е. будет скользить по этой линии к началу координат. Описанный режим, соответствующий участку аЬ, называется поэтому скользящим режимом. В этом режиме переходный процесс в релейной системе протекает, как в системе непрерывного действия [см. уравнение (8-38)]. При значениях хну, соответствующих линии переключения, реле должно переключаться. Поэтому физически скользящий режим заключается в бесконечно быстрых переключениях реле, вызывающих соответственно колебания х с бесконечно малой амплитудой относительно постепенно спадающего к нулю среднего значения х. В реальных системах частота и амплитуда колебаний конечны, т. е. изображающая точка движется к началу координат, колеблясь относительно линии переключения. Поэтому в действительности хвост переходной характеристики на рис. 8-16, а представляет собой высокочастотные колебания, а изображенная на рисунке кривая является постоянной составляющей величины х. Скользящий режим является одним из возможных способов осуществления так называемой вибрационной лине-ариз.ации, о которой мы будем говорить в следующей главе (см. § 9-3) и позднее при рассмотрении релейных систем автоматического управления в одиннадцатой главе (см. § 11-3). Пока отметим только, что природа этой линеаризации та же, что и у рассмотренной в § 8-3, п. Г линеаризации нелинейных звеньев случайным сигналом. На рис. 8-16, бив показаны фазовые портреты рассматриваемой системы с двухпозиционным реле, имеющим зону нечувствительности. При малом значении ко.с и соответственно малом наклоне линий переключения относительно оси ординат (рис. 8-16, б) фазовый портрет мало отличается от случая при fco.c = О (рис. 8-14, б). Однако при достаточно сильной обратной связи в этой системе тоже возможен скользящий режим. Он показан на рис. 8-16, в. Как и в предыдущем случае, скользящий режим начинается в точке линии переключения, в которой наклон касательной (прямая / на рис. 8-16, б) к фазовой траектории (линия 2 на том же рисунке) становится больше наклона линии переключения. В результате фазовая траектория не пересекает линию переключения, а отражается от нее обратно, совершая колебания между двумя линиями переключения, соответствующими ширине петли статической характеристики реле. Показанные на рис. 8-16, в пункти- ром линии переключения относятся к отраженным от сплошных линий переключения траекториям, соответствующим (р ~ Л- В . в верхней полуплоскости и фс = - .В в нижней. На рис. 8-16, б и 18-14, б эти линии не даны, так как там нет отраженных траекторий. Переходный процесс заканчивается установлением автоколебаний, амплитуда которых определяется шириной петли характеристики реле. Таким образом, с ростом ко.с амплитуда устойчивых автоколе-, баний в системе уменьшается вплоть до величины, определяемой шириной петли характеристики реле. Скользящий режим возможен и при трехпозиционном реле. Б последнем случае изображенные на рис. 8-14, в линии переключения тоже наклоняются против часовой стрелки, а скользящий режим происходит путем движения изображающей точки по одной линии переключения до особой линии застоя на оси абсцисс. Это соответствует быстрым отключениям и включениям реле все время в одну и ту же сторону. Линии переключения необязательно являются прямыми линиями, как на рис. 8-14 и 8-16. Если, например, в системе, изображенной на рис. 8-15, измеритель скорости имеет нелинейную характеристику фо.с (у), уравнение (8-36) линии переключения примет вид: х+р АУ) = 0. (8-39) Соответственно линия переключения будет непрямой. Аналогичное искривление этой линии произойдет, если имеется нелинейность в канале основной обратной связи по х. Для получения более точных количественных оценок фазовых траекторий и, в частности, значений частоты и амплитуды возможных автоколебаний А. А. Андроновым разработан метод точечных преобразований. Сущность его состоит в следующем. Возьмем начальное положение изображающей точки Мо в произвольном месте положительной полуоси х с абсциссой х (рис. 8-17, а). Обойдя один раз вокруг начала координат, изображающая точка окажется в некоторой другой точке Mi этой оси с абсциссой Xi. Значение х может быть выражено как функция значения х через уравнение фазовых траекторий. Возможный вид этой функции Xi = f {Xf,) показан на рис. 8-17, б. По виду этой функции можно судить о характере поведения системы. Если 1 (рис. 8-17, а), процесс является затухающим, а если Xi> Xq - расходящимся. При щ = х имеет место предельный цикл (автоколебания). Проведем на рис. 8-17, б биссектрису координатного угла, которая соответствует уравнению х = х. Тогда значения Xq, соответствующие затухающим процессам, определятся участками зависимости/ (Хо), лежащими ниже биссектрисы (на рис. 8-17, б это участки левее точки 7 и правее точки 2), а расходяпщмся процессам будут соответствовать участки зависимости / (агр) выше биссектрисы (на рис. 8-17, б это участок между точками 1 и 2). Точка пересечения зависимости / (жд) с биссектрисой определяет амплитуду А возможных автоколебаний в системе. При этом, если кривая / {х) пересекает биссектрису сверху вниз (точка 2 на рис. 8-17, б), автоколебания устойчивы, а если снизу вверх (точка 1 на рис. 8-17, б) - неустойчивы. Для пояснения последнего утверждения на рис. 8-17, б тонкими линиями со стрелками показана последовательность изменения X во времени на разных участках зависимости / (жо). Здесь, начиная с произвольного исходного значения х, вначале определяют соответствующее ему значение х путем проведения вертикальной линии с выбранной абсциссой х до пересечения с кривой / (х). Далее, принимая это значение за новое Xq, определяют соответ- 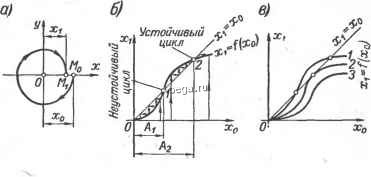 Рис. 8-17. Метод точечных преобразований. ствующее ему новое значение х. Для этого от первой точки кривой / (жо) проводят вначале горизонтальную линию до биссектрисы (перевод Xi в х), а затем - вертикальную линию от нее до кривой / (хо). Из этой точки вновь проводят горизонтальную, затем вертикальную линии и т. д. График на рис. 8-17, б соответствует устойчивости в малом системы, имеющей фазовый портрет, приведенный на рис. 8-11, д. Определение х по х, т. е. нахождение точки по точке Mq, называется точечным преобразованием. В результате обхода изображающей точкой начала координат точка Мо преобразуется в точку м. Зависимость х = f (Xq) определяет такое точечное преобразование всех точек положительной полуоси X в соответствующие другие точки этой же полуоси, т. е. зависимость Xi = f {xq) описывает точечное преобразование положительной полуоси х в саму себя, происходящее при обходе изображающей точкой начала координат. График х - f (Xq) называется диаграммой точечного преобразования. С помощью точечного преобразования, которое осуществляется по уравнению фазовых траекторий, можно, таким образом, 1едовать характер возможных режимов в системе, не строя азового портрета. Метод точечных преобразований удобен, в астности, для определения влияния изменения разных параметров астемы на характер переходных процессов в ней. При этом могут лть определены критические, так называемые бифуркаци-I в н ы е значения параметров, переход через которые качествен-меняет фазовый портрет системы. Для иллюстрации на рис. 8-17, в показано возможное измене-ве диаграммы точечного преобразования системы нри вариации параметров. Кривая 1 повторяет диаграмму на рис. 8-17, б. (ривая 3 соответствует устойчивости в целом. Кривая 2 касается Биссектрисы в точке, соответствующей полуустойчивому циклу, кривая определяет бифуркационные значения параметров астемы, нри которых система находится на границе между ка-ственно различными типами фазового портрета. При бесконечно юм отклонении параметров в одну сторону система становится стойчивой в целом (кривая 3 на рис. 8-17, в), а в другую - устой-авой только в малом с переходом к устойчивым автоколебаниям j)H больших отклонениях от установившегося режима (кривая 1 а рис. 8-17, в). Точечное преобразование можно осуществлять необязательно 1я действительной полуоси х. Иногда, например, проще строить ааграмму точечного преобразования для полуоси у. В тех слу-аях, когда фазовый портрет симметричен относительно одной из координатных осей, как, например, на рис. 8-14, достаточно наводить точечное преобразование для половины оборота изобр.ажаю-цей точки вокруг начала координат, т. е. точечное преобразова-яе положительной полуоси в отрицательную. Если на фазовом портрете есть линии переключения, то обычно лесто координатных полуосей удобнее находить точечное пре-Зразование для этих линий. ГЛАВА ДЕВЯТАЯ УСТОЙЧИВОСТЬ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 9-1. МЕТОДЫ ИССЛЕДОВАНИЯ УСТОЙЧИВОСТИ А. М. ЛЯПУНОВА Единственным общим методом точного исследования динамики, том числе и устойчивости, нелинейных систем является рас-лотренный в § 8-5 метод фазовых траекторий. Однако область го применения практически ограничена системами второго по-вдка. Разумеется, мощным средством исследования нелинейных стем автоматического управления являются вычислительные зы.
|