
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления При рассмотрении устойчивости нелинейных систем в дополнение к ранее введенным понятиям устойчивости в малом, в большом и в целом используется еще понятие асимптотической устойчивости. Асимптотическая устойчивость имеет место, если фазовые траектории вблизи начала координат асимптотически стягиваются к нему. Линейные системы могут быть устойчивы только асимптотически, так как у них возможен только один установившийся режим, соответствующий в фазовом пространстве началу координат. Примером неасимптотически устойчивой нелинейной системы является система с зоной нечувствительности и фазовым портретом, показанным на рис. 8-11, в. Системы с фазовыми портретами на рис. 8-11, а, б vi д асимптотически устойчивы в малом, т. е. при воздействиях, при которых изображающая точка не выходит за предельный неустойчивый цикл. Напомним еще раз, что, говоря здесь об устойчивости нелинейной системы, мы должны всегда иметь в виду устойчивость ее определенного установившегося режима, соответствующего началу координат фазового пространства. В заключение параграфа укажем еще несколько терминов, связанных с описанными выше фазовыми портретами. Точки, соответствующие установившемуся состоянию системы, называются особыми точками. На всех рис. 8-11, кроме рис. 8-11, в, такой особой точкой является начало координат. В случае рис. 8-11, в особые точки образуют целый особый отрезок. Особые точки бывают четырех видов - центр, фокус, узел и седло. Центром называется особая точка в начале координат, изображенная на рис. 8-11, з. Фокус может быть устойчивым (начало координат на рис. 8-11, с, б и а) и неустойчивым, т. е. соответствующим неустойчивому состоянию равновесия (начало координат на рис. 8-11, г). Начало координат на рис. 8-11, е является особой точкой, называемой неустойчивым узлом. Если на этих же фазовых траекториях поменять направления стрелок, так что траектории станут входить в начало координат, что соответствует устойчивой системе, начало координат будет называться устойчивым узлом. Седло - это особая точка в виде начала координат на рис. 8-11, ж. Седло всегда неустойчиво, т. е. соответствует неустойчивому состоянию равновесия. Системы с фазовым портретом, представленным на рис. 8-11, г, называются системами с мягким режимом возбуждения колебаний. В таких системах после их включения всегда устанавливаются автоколебания при любых начальных условиях и внешних воздействиях. Системы с фазовым портретом на рис. 8-11, д называются системами с жестким режимом возбуждения колебаний. Для того чтобы в этих системах возникли автоколебания, соответствующие устойчивому циклу, необходимо [создать достаточно большое начальное отклонение приложением, например, возмущения, при котором изображающая точка ока-[жется вне неустойчивого предельного цикла 1. Если после уста-I новления автоколебаний какое-либо возмущение сместит изобра-жающую точку в сторону начала координат внутрь неустойчивого [ цикла 1, колебания в системе опять затухнут. § 8-5. ИССЛЕДОВАНИЕ НЕЛИНЕЙНЫХ СИСТЕМ НА ФАЗОВОЙ плоскости j Фазовый портрет дает полное представление о динамике нелинейной системы второго порядка при детерминированных воздействиях, включая точность, устойчивость и качество процессов. Б связи с тем, что на фазовой плоскости в явном виде отсутствует время, из фазового портрета непосредственно нельзя определить только быстродействие системы. Однако приблизительную оценку его все же дать можно по величине скорости dx/dt выходной переменной, которая обычно используется в качестве второй коорди- . наты, откладываемой по оси ординат. Действительно, в этом случае время перехода изображающей точки из одного положения в достаточно близкое последующее может быть приближенно определено но формуле Где Аж - приращение х, соответствующее данному перемещению изображающей точки, а жр - среднее значение скорости dx/dt этого перемещения, определяемое как ордината середины отрезка фазовой траектории между данными точками. Пользуясь этой формулой, можно по фазовой траектории приближенно построить соответствующую ей кривую переходного процесса х (t). Б случае автоколебательного процесса можно таким же образом определить величину периода колебаний. Фазовая плоскость является основным методом исследования нелинейных систем второго порядка. Это связано с тем, что для этих систем построение фазового портрета можно выполнить непосредственно по дифференциальному уравнению системы, не решая его. Рассмотрим методику построения фазового портрета нелинейной системы второго порядка. В качестве координат примем отклонение X выходной величины системы от ее значения, соответству-ющего установившемуся режиму системы, и ее первую производную у = dx/dt. Предварительно описание системы должно быть приведено к системе двух уравнений первого порядка следующего вида: (8-25) где у = dx/dt, а Q vi Р - нелинейные функции от выходной величины а; и ее производной у. Если, например, математическое описание системы представляет собой уравнение второго порядка dx ,1 dx\ (8-26) то, введя обозначение у = dx/dt, из (8-26) непосредственно получим систему (8-25) в виде: ж=У- Разделив первое уравнение (8-25) на второе, получим уравнение фазовых траекторий в виде нелинейного дифференциального уравнения первого порядка: dy Q(x,y) dx Р(х, у)- У- (8-27) Таким образом, путем исключения времени мы упростили задачу, перейдя от уравнения второго порядка (или, что то же самое, - от двух уравнений первого порядка) к одному уравнению первого порядка. Однако построение траекторий в общем случае не требует решения и этого уравнения и может быть выполнено так называемым методом изоклин. Для этого вначале на фазовой плоскости строятся линии, соответствующие алгебраическому уравнению R{x,y) = C, (8-28) где С - постоянная величина, для которой задается ряд произвольных значений от - со до -- оо. Каждому значению С соответствует своя линия. Эти линии называются изоклинами. Как следует из уравнения (8-27), для каждой изоклины имеется равенство dy/dx = С, т. е. изоклина - это геометрическое место точек с одинаковым наклоном фазовых траекторий, проходящих через эти точки. Величина С при этом определяет тангенс угла наклона фазовой траектории относительно оси абсцисс. На рис. 8-12, а дан пример построения изоклин. Стрелочками на них показано направление фазовых траекторий. Здесь же цифрами обозначены соответствующие величины С. По изоклинам нетрудно построить сами фазовые траектории, луководствуясь стрелочками. На рис. 8-12, б дается пояснение Евтой операции. Из произвольно выбранной начальной точки Mq фоводятся два луча до пересечения со следующей изоклиной. Эдип луч имеет наклон, соответствующий стрелке на данной [изоклине, а другой - стрелке на следующей изоклине. Точка I данной фазовой траектории на следующей изоклине определяется как середина отрезка между точками пересечения лучей с этой [изоклиной. Таким же образом находится следующая точка и т. д. Точность построения фазовой траектории может быть существенно повышена, если имеется возможность решить уравнение а) 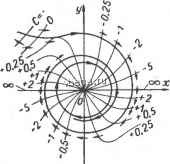  Рис. 8-12. Построение фазовых траекторий с помощью изоклин. (8-27). В этом случае изоклины не строятся, а непосредственно путем интегрирования уравнения (8-27) находится зависимость между у В.Х, определяющая выражение для фазовых траекторий. В частности, такая возможность существует в широко распространенном случае нелинейностей, которые могут быть представлены кусочно-линейными характеристиками. К таким нелинейностям, например, относятся все типовые нелинейности, приведенные в приложении 5, кроме нелинейностей 8 и 10. Впрочем и последние нелинейности тоже могут быть аппроксимированы ломаной линией. В случае таких кусочно-линейных характеристик нелинейных звеньев правая часть уравнения (8-27) системы представляет собой набор нескольких линейных функций, соответствующих отдельным линейным участкам характеристики нелинейного звена. В процессе изменения xviy происходит замена одной такой функции другой в моменты прохождения через точки излома нелинейной характеристики. В результате фазовая характеристика разбивается соответственно на ряд участков, в пределах каждого из которых уравнение (8-27) является линейным и, следовательно,
Рис. 8-13. Структурная схема нелинейной САУ. легко интегрируемым. Такой метод интегрирования по участкам уравнения с кусочно-линейной нелинейностью называется методом припасовывания (или сшивания). На фазовой плоскости точкам излома кусочно-линейной характеристики соответствуют так называемые линии переключения. При пересечении фазовой траекторией этих линий происходит излом траекторий вследствие изменения правой части описывающего их уравнения (8-27). Рассмотрим для примера фазовый портрет нелинейной системы, структурная схема которой приведена на рис. 8-13. Здесь ф (е) - кусочно-линейная статическая характеристика. В качестве этой характеристики возьмем некоторые релейные характеристики, приведенные в приложении 5. Такую структурную схему может иметь, например, релейная следящая система. В этом случае X - это угол поворота вала исполнительного двигателя, х3 - подлежащее отработке заданное значение Х,&Т - постоянная времени двигателя. Изображенная на рис. 8-13 схема описывается следующей системой уравнений: p(Tp + \)X = hU; с/ = ф(е); Исключив промежуточные переменные, получим одно уравнение: p{Tp + l)X = kif{X~X): (8-30) Ограничим свое рассмотрение поведением системы при отклонениях от установившегося режима, соответствующего постоянным значениям задающего сигнала Х. В этом случае, обозначив по-прежнему через х отклонение X от х3 и введя обозначение у = рх, будем иметь систему уравнений: (8-29) (8-31) Разделив первое уравнение на второе и исключив таким образом время, получим дифференциальное уравнение фазовых траекторий: (8-32) dx у Здесь релейная функция ф (ж) может принимать только посто-212 1нные значения -\- В, - В, а в случае трехпозиционного реле [еще и О (см. приложение 5) в зависимости от значения х. вПри каждом из этих значений ф (ж) уравнение (8-32) является линейным и поэтому легко интегрируется. Его решение имеет вид: х=-Т{у + кАт{у-к)\ + С, (8-33) где Ci = T [0-ЬIn (Уо - /сфс)1 -Ьх\ жо, начальные зна- [[ения а; и у, а фс может быть равно -- В, -В или 0. При ф = О, частности, уравнение (8-33) принимает вид: хТ(уо - у) + х,. (8-34) Таким образом, фазовые траектории рассматриваемой системы описываются тремя друг друга сменяющими по ходу изображаю- 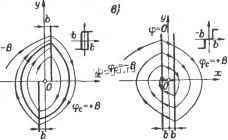 Рис. 8-14. Фазовые портреты нелинейных систем. щей точки линейными уравнениями. Моменты перехода от одного уравнения к другому, т. е. моменты изменения величины ф. в уравнении (8-33), соответствуют переключениям реле и определяются его характеристикой. По ней легко строятся на фазовой плоскости линии переключения, представляющие собой геометрическое место точек, в которых происходит переключение реле. На рис. 8-14 приведены построенные по уравнению (8-33) фазовые траектории рассматриваемой системы для трех вариантов релейных характеристик ф(а;), изображенных здесь же. Жирными линиями показаны линии переключения. В первом случае (рис. 8-14, а) эта линия совпадает с осью ординат, поскольку ее уравнение, определяющее момент переключения реле, в соответствии с его характеристикой имеет вид: х = 0. Во втором случае (рис. 8-14, б) уравнение линий переключения (их здесь две) будет b при 2/>0; b при 2/<0,
|
||||||||||||||