
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления ЧАСТЬ ВТОРАЯ теория нелинейных систем автоматического управления глава восьмая: ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. ИХ СТАЦИОНАРНЫЕ РЕЖИМЫ § 8-1. ВВЕДЕНИЕ С точки зрения математического описания системы автоматического управления делятся на линейные и нелинейные. Нелинейная система - это система, содержащая хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением (см. § В-2, и. Г). Все реальные САУ нелинейны, однако часто имеется возможность, ограничившись рассмотрением малых отклонений от установившегося режима, свести задачу к исследованию линейной модели реальной системы путем линеаризации последней. Как было показано в § 1-2, это возможно в случае систем, содержащих только несущественно нелинейные звенья. Условия линеаризации звеньев определяют область применения рассмотренной в первой части книги теории линейных САУ. Кроме того, эта теория мoн;eт быть использована для приближенного исследования САУ, содержащих и существенно нелинейные звенья, если эти нелинейности достаточно малы и ими в первом приближении можно пренебречь. Так, например, часто можно не учитывать имеющуюся у какого-либо звена зону нечувствительности, если она мала по сравнению с установившимися отклонениями в системе, определяемыми без ее учета. Так может быть отброшена петля гистерезиса (например, в статической характеристике электромашинного усилителя), если она достаточно узка. Примером существенной нелинейности, которой никогда нельзя пренебречь, является релейная характеристика. Включение в систему звена с такой характеристикой придает системе качественно совершенно новые свойства. В приложении 5 приведены характеристики и уравнения некоторых типовых существенно нелинейных звеньев. Здесь показаны, в частности, следующие нелинейности: насыщение (ограничение), нечувствительность, неоднозначность в виде дшртвого хода (люфта) и релейные характеристики. Все эти нелинейности симметричны. Аналогично можно составить описание и для несимметричных нелинейностей, а также нелинейностей, представляющих собой комбинации указанных простых нелинейностей, например мертвого хода с насыщением и т. п. В результате математического описания нелинейной САУ составляется структурная схема, состоящая из линейных, т. е. линеаризованных, и существенно нелинейных звеньев. При описании последних, в свою очередь, осуществляется идеализация с целью упрощения этого описания вплоть до перехода в большинстве случаев к типовым нелинейностям (см. приложение 5). Нелинехности существенно усложняют исследование систем, так как нет общих методов решения описывающих их нелинейных дифференциальных уравнений. Однако в настоящее время имеется ряд методов решения отдельных классов нелинейных задач. Эти методы достаточно просты и позволяют путем их совместного применения успешно решать задачи анализа нелинейных САУ. Хотя нелинейности затрудняют исследование САУ, их нельзя рассматривать как обязательно нежелательное явление. Нелинейности в равной степени могут оказывать как вредное, так и полезное влияние на работу системы. Более того, наряду с нелиней-ностями, присутствующими в САУ HOMVIMO нашего желания, например, в объекте управления, широко применяются нелинейности, специально вводимые в управляющее устройство системы с целью получения определенного положительного эффекта в работе САУ. К таким нелинейностям относятся, в частности, релейные управляющие устройства (см. одиннадцатую главу) и нелинейные корректирующие звенья в системах непрерывного действия. Нелинейности придают САУ ряд качественно особых свойств, невозможных в линейных САУ. Нелинейные системы неизмеримо богаче по своим возможностям, чем .линейные. Последние образуют, собственно говоря, довольно узкий класс систем, представляющих собой результат предельного упрощения реальных нелинейных систем. § 8-2. СТАЦИОНАРНЫЕ РЕЖИМЫ НЕЛИНЕЙНЫХ СИСТЕМ ПРИ ДЕТЕРМИНИРОВАННЫХ ВОЗДЕЙСТВИЯХ Все основные результаты, полученные ранее во второй главе при рассмотрении точности линейных САУ в стационарных режимах, остаются справедливыми и для нелинейных систем. Сюда относятся, в частности, положения о влиянрш на точность САУ величины коэффициента передачи системы, порядка астатизма, компенсирующих воздействий по внешним возмущениям. случае положительной обратной связи. Таким образом получена характеристика 3 - результирующая характеристика при отрицательной обратной связи и характеристика 4 - при положительной обратной связи. Как видим, отрицательная обратная связь уменьшает, а положительная увеличивает крутизну результирующей характеристики. Это соответствует уже известной нам зависимости коэффициента передачи охваченного обратной связью звена от знака и величины обратной связи (см. § 7-3). Приведенное на рис. 8-2, в построение иллюстрирует также указанное ранее положение о том, что в случае линейной обратной связи отрицательная обратная связь уменьшает, а положительная уве личивает нелинейность результирующей статической характеристики. Это объясняется тем, что происходящее нри этом пропорциональное изменение абсцисс соответственно изменяет удельный вес нелинейности исходной характеристики звена в результирующей характеристике звена с обратной связью. , Все построения на рис. 8-2 для простоты выполнены в нервом квадранте. Разумеется, все изложенное справедливо при любом расположении характеристик относительно координатных осей. , С помощью указанных построений многоконтурная САУ может быть приведена к одноконтурной схеме, состоящей дз объекта управления О и управляющего устройства УУ, каждый из которых характеризуется своей статической характеристикой (рис. 8-3, а). Если исходная схема имеет перекрещивающиеся ветви, они должны быть предварительно устранены путем преобразования схемы в соответствии с правилами, изложенными в § 1-5. Оперировать надо при этом не передаточными функциями, как там говорилось, а статическими характеристиками. Объект управления О (рис. 8-3, а) имеет две входные величины- управляющее воздействие U и внешнее возмущение F. Поэтому он описывается показанным на рис. 8-3, б семейством стати- 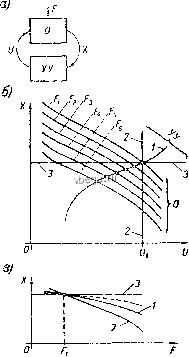 Рис. 8-3. Статические характеристики нелинейной САУ. ческих зависимостей X от U, каждая из которых соответствует определенному значению F. На рис. 8-3, б приведено построение искомой статической зависимости X от F замкнутой системы но статическим характеристикам объекта и статической характеристике управляющего устройства (кривая 1). Последняя характеристика строится в той же системе координат, что и характеристика объекта, только для нее X является входной, а U - выходной величиной. Точки пересечения характеристик объекта с характеристикой управляющего устройства определяют значения переменных, удовлетворяющие характеристикам обоих звеньев и, следовательно, дают значения X vi F, по которым может быть построена искомая статическая характеристика системы, приведенная на рис. 8-3, в (кривая 1). На этом же рисунке показана характеристика объекта при постоянстве U, т. е. при отсутствии управления (кривая 2). Эта характеристика соответствует точкам пересечения характеристик объекта на рис. 8-3, б с вертикальной линией 2, уравнение которой и = Uy = const. Пунктиром на рис. 8-3, в показана характеристика замкнутой системы, получающаяся нри увеличении коэффициента передачи управляющего устройства и соответственно при более пологой характеристике управляющего устройства на рис. 8-3, б. Характеристика 3 на рис. 8-3, в соответствует характеристике 3 управляющего устройства на рис. 8-3, б и получается при увеличении до бесконечности коэффициента передачи управляющего ycTpoiicTBa, т. е. при введении в это устройство интегрирующего звена с переходом, следовательно, к астатическо11 САУ. Если САУ комбинированная, на ее управляющее устройство помимо X подается еще внешнее возмущение F. В этом случае управляющее устройство описывается, как и объект управления, семейством статических характеристик, каждая из которых соответствует определенному значению F. Характеристики замкнутой системы нри этом строятся по точкам пересечения характеристик объекта и управляющего устройства, соответствующим одинаковому значению F. Например, если в качестве конкретной системы взять систему автоматического регулирования напряжения генератора, приведенную на рис. В-2, в, то для нее у изображенных на рис. 8-3 характеристик неременные X, U vi F соответственно означают регулируемое напряжение генератора, напряжение его возбуждения и нагрузку. Аналогично строится статическая зависимость выходной величины X от внешнего воздействия в виде задающего воздействия Х. В этом случае управляющее устройство характеризуется семейством зависимостей U от X при ряде заданных значений Х.
Таким же образом можно строить характеристики САУ для стационарных динамических режимов, рассмотренных во второй главе. Описанная методика построения статических характеристик позволяет оценивать влияние нелинейности и нестабильности отдельных звеньев на характеристику всей системы, а также взаимно согласовывать характеристики звеньев с целью получения желаемой результируюп],ей характеристики САУ. § 8-3. СТАЦИОНАРНЫЕ РЕЖИМЫ НЕЛИНЕЙНЫХ СИСТЕМ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ. СТАТИСТИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ А. Прохождение случайного сигнала через нелинейное звено Стационарные случайные режимы САУ возникают при действии на систему стационарных случайных воздействий. Предметом исследования САУ в таких режимах является точность системы, оцениваемая средним значением (математическим ожиданием) и дисперсией или среднеквадратичным отклонением выходной величины. Методика исследования стационарных случайных режимов для линейных систем была рассмотрена в третьей главе. В случае нелинейных систем задача существенно усложняется вcJIeд-ствие неприменимости здесь принципа суперпозиции. В связи с этим был создан метод приближенного исследования точности нелинейных САУ в стационарных случайных режимах, называемый методом статистической линеаризации. Этот метод разработан И. Е. Казаковым и Бутоном в 1954 г. и заключается в замене нелинейной системы линейной, эквивалентной исходной системе в отношении реакции на заданное случайное воздействие. В результате возникает возможность применить для исследования нелинейных систем описанный в третьей главе аппарат исследования линейных систем. Прежде чем перейти к изложению метода статистической линеаризации, рассмотрим особенности прохождения стационарного случайного сигнала через нелинейное звено. В качестве примера возьмем нелинейное звено НЛ (рис. 8-4, а) со статической
Pitc. 8-4. Искажение кривой распределения плотности вероятности сигнала нелинейным звеном. ,1 характеристикой с насыщением (рис. 8-4, б). Для простоты примем коэффициент передачи звена, соответствующий линейному участку характеристики, равным единице. Пусть на вход звена поступает случайная величина X = шх + с нормальным распределением, график плотности вероятности р (Х) которой показан на рис. 8-4, в. На рис. 8-4, г изображен график плотности вероятности выходной величины Y = ту + У . Значения X, лежащие внутри линейной зоны характеристики звена, т. е. по абсолютному значению ие выходящие за уровень ограничения Ь, проходят через звено без искажения. Поэтому часть кривой р {¥), лежащая в пределах У = ± 6, совпадает с соответствующей частью кривой р {X). Все значения X, превышающие по абсолютной величине уровень Ь, дают на выходе звена одну и ту же величину Y, равную Ь, знак которой определяется знаком X. Вероятность появления сигнала У, по величине большего Ь, равна нулю. В результате участкам кривой р (Х) при Z >> 6 соответствуют в кривой р (У) бесконечно узкие импульсы при У = dz 6, площадь каждого из которых равна заштрихованной на рис. 8-4, в площади под кривой р (Х). На рис. 8-4, г для наглядности эти импульсы показаны условно конечной ширины и высоты. Если изменять среднее значение тх входной величины, то соответственно будет изменяться как среднее значение 7Пу выходной величины, так и ее дисперсия. В частности, прп увеличении 7Пх величина ту будет возрастать, стремясь к значению Ь, а дисперсия уменьшаться, стремясь в конце концов к нулю, когда 7Пх станет много больше Ь. Если при неизменном Шх сужать или расширять кривую/? (Z), изменяя дисперсию входной величины, будут изменяться тоже как среднее значение выходной величины, так и ее дисперсия. При этом в случае сужения кривой р {X) величина ту будет увеличиваться, стремясь к Шх по мере того, как кривая р {X) будет все больше входить внутрь диапазона zhb, а дисперсия выходной величины будет стремиться к нулю одновременно с дисперсией входной величины. Таким образом, при прохождении случайного сигнала через нелинейное звено закон распределения плотности вероятности его искажается. При этом среднее значение величины на выходе звена и ее дисперсия зависят каждая как от среднего значения, так и от дисперсии входной величины. В этом проявляется неприменимость к нелинейным звеньям принципа суперпозиции в отличие от линейных систем, где возможно независимое определение реакции системы на среднее значение, т. е. на детерминированную часть внешнего воздействия, и на его центрированную случайную составляющую (см. третью главу). На рис. 8-5, а и б приведены зависимости и ау от 7Пх и Ох, построенные для рассмотренного звена со статической характеристикой с насыщением (см. рис. 8-4, б) в случае нормального Распределения входного сигнала.
|
|||||||||||||||||||||||||||||