
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления возможности объединить их всех в одном сложном критерии оптимальности и решить задачу синтеза как строго математическую вариационную задачу на экстремум этого критерия. Поэтому практически синтез САУ разбивается путем известного упрош;ения на ряд этапов, на каждом из которых решается какая-то часть задачи синтеза, т. е. рассматривается какой-то один ее аспект. При решении некоторых из этих отдельных задач часто удается сформулировать численный критерий оптимальности и, таким образом, решить зйдачу средствадш вариационного исчисления (см. об этом тринадцатую главу). Поскольку обш,ий критерий оптимальности отсутствует, для нахождения наилучшего решения обычно приходится производить расчет нескольких вариантов управляющего устройства и только в результате их сравнения выявлять оптимальный вариант. Рассмотрим общий порядок поэтапного синтеза линейной САУ. При этом пока ограничим свое рассмотрение синтезом простейших САУ - систем автоматического регулирования. Особенности синтеза систем с более сложным алгоритмом, а также нелинейных систем будут рассмотрены позднее. А. Определение порядка астатизма п коэффициента передачи системы Эти параметры находятся исходя из требований к точности в установившихся режимах при детерминированных воздействиях, как показано во второй главе. При этом, если коэффициент передачи системы, определенный по требуемой величине статизма или добротности (в случае астатических САУ), оказываете настолько большим, что существенно затрудняет даже просто стабилизацию системы, целесообразно повысить порядок астатизма и тем свести до нуля заданную установившуюся ошибку вне зависимости от значения коэффициента передачи системы. В результате становится возможным величину этого коэффициента выбирать, исходя только из соображений устойчивости и качества переходных процессов. На этом же этапе решается вопрос о применении воздействий но основному возмущению (или по нескольким из них), т. е. о переходе к комбинированной САУ. Это целесообразно, если, во-первых, имеется возможность достаточно просто измерить данное возмущение и, во-вторых, когда в результате введения компенсации этого возмущения существенно упростится замкнутый контур САУ. Последнее будет иметь место, если при отсутствии компенсации для получения нунной точности требуется достаточно большой коэффициент передачи в контуре, а введение компенсации позволяет его значительно уменьшить. Кроме того, следует помнить, что воздействия но внешним возмущениям повышают и качество переходных процессов, к чему обратимся на следующих этапах синтеза.  Б. Определение основной, т. е. неварьируемой, части системы Часть звеньев САУ обычно однозначно определяется сразу непосредственно по заданию на разработку системы. Сюда относятся прежде всего объект управления и смежные с объектом и поэтому определяемые им исполнительные и чувствительные звенья управляющего устройства. Разумеется, при выборе этих звеньев необходимо исходить из предъявляемых к САУ требований, в том числе и по точности и быстродействию. Часто однозначно определяемыми или даже заданными оказываются и другие звенья управляющего устройства (преобразователи, усилители, вычислительные устройства). В результате составляется костяк структурной схемы системы, которая должна быть дополнена корректирующими звеньями, а также звеньями, выбор которых требует учета устойчивости и качества переходных процессов. Кроме того, некоторые из параметров основных звеньев системы тоже могут оказаться неопределенными, т. е. варьируемыми, и, следовательно, подлеж;ащими определению. В. Выбор коррекции и составление структурной схемы САУ При невысоких требованиях к качеству переходных процессов и точности в стационарных случайных режимах выбор корректирующих звеньев, а также варьируемых параметров всех других звеньев системы осуществляется по условию, обеспечения устойчивости с получением достаточно большой области устойчивости в пространстве варьируемых параметров системы (см. четвертую главу). После этого выбираются значения варьируемых параметров (рабочая точка в области устойчивости), обеспечивающие выполнение требований к качеству переходных процессов и точности в стационарных случайных режимах. При достаточно высоких требованиях к качеству переходных процессов или точности в стационарных случайных режимах может оказаться, что эти требования нельзя будет удовлетворить путем выбора значений параметров корректирующих звеньев, которые ранее были выбраны только по условию устойчивости, и потребуется дополнительная коррекция. Поэтому в таких случаях следует синтезировать коррекцию сразу исходя из требований к качеству переходных процессов (см. пятую главу) или к точности при стационарных случайных воздействиях (см. третью главу) в зависимости от того, какие из этих двух требований наиболее жесткие. После выбора коррекции проверяется выполнение другой группы требований. При этом в случае необходимости уточняется коррекция. Например, в результате синтеза корректирующих звеньев на минимум среднеквадратичного отклонения выходной величины нри заданном стационарном случайном воздействии переходная характеристика САУ обычно получается с повышенной колебательностью в два-три периода. Поэтому при наличии более Нлостких требований к колебательности переходных процессов приходится изменять настройку корректирующего звена в сторону снижения колебательности САУ за счет некоторого снижения точности в стационарном случайном режиме. В каком случае какие методы синтеза следует применять, было определено нри изложении этих методов. Напомним только, что при синтезе САУ на заданное качество переходных процессов нс-нользованпе корневых и интегральных методов синтеза требует предварительного выбора корректирующих звеньев. Сами же названные методы позволяют лишь определять числовые значения параметров этих звеньев, а также значения варьируемых параметров основных звеньев системы. При использовании частотных методов синтеза находится частотная характеристика варьируемой части системы. Эту часть системы затем следует синтезировать с помощью любых корректирующих звеньев. Если применяется последовательное корректирующее звено, найденная частотная характеристика варьируемой части системы и будет являться непосредственно частотной характеристикой этого корректирующего звена. По ней затем определяется передаточная функция этого звена. Если предполагается применить корректирующую обратную связь, ее передаточную функцию можно легко найти по ранее полученной передаточной функции последовательного корректирующего звена с помощью формулы (7-25). Если используется одновременно последовательная и параллельная коррекция, то из полученной- передаточной функции варьируемой части системы выделяется сперва передаточная функция последовательного корректирующего звена, а затем по оставшейся части это11 передаточной функции находится согласно (7-25) передаточная функция звена обратной связи. Что же касается того, какой способ коррекции в каком случае выбирать, то об этом говорилось в двух предыдущих параграфах. При прочих равных условиях следует останавливаться на наиболее простом варианте коррекции. Мощным методом синтеза САУ является синтез с помощью вычислительных машин. Применение вычислительных машин позволяет, варьируя передаточные функции корректирующих звеньев и значения их параметров в широких пределах, быстро получить большое количество соответствующих кривых переходных процессов и значений среднеквадратичных отклонений выходной величины при случайных воздействиях. Поэтому выбор коррекции и значений варьируемых параметров может быть выполнен простым перебором возможных вариантов. Для этого по каждому варианту коррекции строятся области устойчивости в пространстве варьируемых параметров. В.нутри этих областей наносятся линии равных значенийвыбранных показателей качества (длительность переходного процесса, перерегулирование или колебательность и т. д.). Иногда просто для достаточно большого количества точек в области устойчивости приводятся непосредственно переходные характеристики. Полученная картина позволяет выбрать оптимальную коррекцию. Аналогично определяется значение среднеквадратичного отклонения в разных точках области устойчивости при наличии случайного воздействия. Г. Построение переходных процессов Это завершающий этан синтеза (см. шестую Главу). Здесь необходимо, но возможности, учесть все те упрощения, которые бьши сделаны при математическом описании звеньев системы и в процессе ее синтеза. § 7-6. ОСОБЕННОСТИ СИНТЕЗА НЕКОТОРЫХ ОСОБЫХ СИСТЕМ А. Особенности синтеза систем с постоянным запаздыванием До сих пор, рассматривая линейные САУ, мы не учитывали возможности наличия в них звеньев с запаздыванием. Вместе с тем в последнем случае возникает известная специфика, требующая внесения определенных изменений в описанные ранее методы исследования САУ. Передаточная функция идеального звена с запаздыванием, согласно (1-82), имеет вид е-тр. При наличии в САУ такого звена передаточная функция разомкнутой системы может быть представлена так: (Р) = Ш е- = (р) в , (7-33) Qip) Соответственно характеристическое уравнение замкнутой системы будет таким: (?(Х) + Л(?.)е- = 0.. (7-34) Это трансцендентное уравнение сбесконеч-н ы м ч и с л о м к о р н е й. В связи с последним обстоятельством при исследовании систем с запаздыванием наиболее удобны частотные методы. Устойчивость при этом проще всего исследовать с помощью критерия Найквиста, качество оценивать по показателю колебательности и полосе пропускания, а переходные процессы строить по действительной Или мнимой частотным характеристикам. Амплитудно-фазовая частотная функция идеального звена с запаздыванием равна е- . Таким образом, его амплитудная функция постоянна и равна 1, а фазовая функция равна -тсо, т. е. запаздывание но фазе растет пропорционально частоте. В соответствии с этим на рис. 7-15, а показано построение а. ф. ч. х. разомкнутой системы, содержапдей звено ,с запаздыванием и описываемой частотной функцией Ж(/со) = Ио(/со)е-5 . Эта характеристика получается из а. ф. ч. х. (/со) путем поворота по часовой стрелке вокруг начала координат всех ее точек на угол, пропорциональный текущему значению частоты и равный ТО).. Таким образом, запаздывание приводит к закручиванию а. ф. ч. X. системы вокруг начала координат. Обычно это ухудшает устойчивость, уменьшая запас по фазе (см. рис. 7-15, а). Однако в отдельных случаях запаздывание может улучшить устойчивость 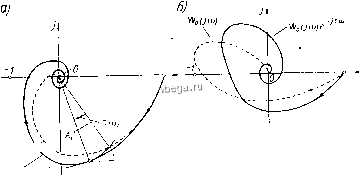 %/Уш)-\ ш,- Рис. 7-15. А. ф. ч. X. разомкнутой системы с запаздыванием. и качество переходных процессов. Это иллюстрирует рис. 7-15, б, где введение запаздывания удаляет а. ф. ч. х. от точки ( - 1, / 0). Все изложенное выше в равной мере относится не только к системам с запаздыванием, ноик системам с распределенными параметрами. Это системы, в состав которых входят звенья с распределенными параметрами, описываемые дифференциальными уравнениями в частных производных типа волнового уравнения. Примерами таких звеньев являются длинные электрические линии и трубопроводы, при описании которых надо учитывать гидравлический удар. Уравнения таких звеньев приводятся к линейным дифференциальным уравнениям, coдepн;aщим функцию е~Р, как и в случае систем с запаздыванием. (Параметр т при этом характеризует время распространения волнового процесса в звене.) Б. Особенности Синтеза нестационарных систем В отличие от рассмотренных выше линейных стационарных систем нестационарные линейные системы - это системы с переменными параметрами, описываемые линей- пыми дифференциальными уравнениями, коэффициенты которых являются функциями времени: 1 0 (t) Р + 1 (О Р + + п-1 (t) Р + п {t)\ Х = = [&0 (О Р + h (О Р - + . + (О Р + ЪА1)\/. (7-35) Зависимости а- {t) и (t) могут задаваться либо аналитически, либо в виде графиков. Непостоянство коэффициентов уравнения возникает вследствие изменения во времени параметров отдельных звеньев системы. Примером звена с переменными параметрами является самолет или ракета, масса, а следовательно, и постоянные времени которы-х изменяются по мере сгорания топлива. Параметры звеньев могут изменяться также из-за изменения во времени внешних условий работы - температуры, напряжения питания и т. п. Переменность коэффициентов дифференциального уравнения САУ приводит к тому, что функциями времени оказываются также передаточная функция системы (р, t), частотная функция Ws (/со, t) и переходная h {t - v, v). В последнем выражении через V обозначен момент подачи на САУ ступенчатого воздействия. Поскольку все эти функции содержат в качестве параметра время t, они называются параметрическими (параметрическая передаточная функция и т. д.) Непостоянство коэффициентов уравнения во времени усложняет задачу исследования динамики подобных систем. Только уравнения с переменными параметрами первого и второго порядков могут быть решены в общем виде. Уравнения более высоких порядков решаются методами численного интегрирования, а также на вычислительных машинах. Как и в случае систедг с постоянными параметрами, переходный процесс в рассматриваемых САУ может быть построен с помощью действительной или мнимой частотных характеристик. Например, построение переходного процесса по действительной характеристике замкнутой системы осуществляется согласно формуле () = -С/з( , tfd<.. (7-36) Эта формула отличается от аналогичной формулы (6-29) для САУ с постоянными параметрами тем, что сюда входит параметрическая дехствительная характеристика (со, t), которая изменяется во времени. Построение переходной характеристики ведется следующим образом. Для ряда фиксированных значений времени строятся характеристики (ю, t-), по которым затем известным методом с помощью трапецеидальных характеристик находятся переходные характеристики (t) (см. § 6-2). Искомая характеристика h (t) строится, как показано на рис. 7-16, по точкам кривых (t), соответствующим значениям времени, для которых получены характеристики Us (со, t).
|