
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Кроме того, вся подынтегральная функция первого интеграла представляет собой четную функцию со, и поэтому нижний предел этого интеграла можно взять равным нулю, одновременно удвоив значение интеграла. В результате имеем 1 (* t/3 ((!)) sin (ot rfco + + l}3jco2 j (6-27) Если изменить в (6-27) знак у времени t, то, учитывая, что h {- t) = О, получим уравнение 2 3 V / JX .) (О + \~d. (6-28) Вычтя (6-28) из (6-27), найдем следующее окончательное выражение для переходной функции через действительную частотную характеристику спстемы: (6-29) Сложив (6-27) и (6-28), получим другое выражение перехвдной функции через мнимую частотную характеристику: hit) = UAO) + y---d., (6-30) где, напомним, Ub (0) представляет собой значение h {00). Рассмотренные в § 5-2 критерии качества переходного процесса по действительной или мнимой частотным характеристикам системы получены из анализа именно этих выражений. С помощью выражений (6-29) и (6-30) можно построить искомую переходную функцию h (t) путем графического нахождения входящих в них интегралов по заданному графику соответствующей частотной характеристики U ( ) или Fg (со). Рассмотрим разработанную В. В. Солодовниковым методику такого построения по действительной характеристике U (со), т. е. используя выражение (6-29). Для этого, как показано на .рис. 6-1, а, действительную характеристику U3 (со) заменяем ломаной линией. В результате u3 (со) представляем алгебраической суммой нескольких трапеций С/д (oi) (трапеции i, 2, 3 на рис. 6-1, а). Соответственно, искомую переходную характеристику h (t) можно согласно (6-29) записать в виде алгебраической суммы нескольких составляющих, каждая из которых определяется одной из трапеций, т. е. hit)=-Elii{t), (6-31) /z,(0 = j--rfco. (В случае характеристики, изображенно!! на рис. 6-1, а, получаются три трапеции: трапеция 1 входит в сумму (6-31) со знаком плюс, а трапеции 2 и 3 вычитаются из нее.) а) 61 -  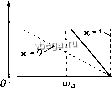 у. = 0.3 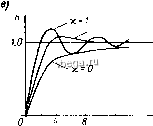 Рпс. 6-1. Построение переходно!! характеристики по действительной частотной характеристике системы. Построение отдельных составляющих (t) легко осуществляется с помощью приведенных в приложении 4 таблиц переходных функций h (т), рассчитанных для нормированных трапе-ци й. Нормированные трапеции имеют (рис. 6-1, б) U (0) = 1, соц = 1, и, таким образом, каждая характеризуется одим варьируемым параметром х = со,/сОо, который может иметь значение от нуля (трапеция превращается в треугольник) до единицы (трапеция превращается в прямоугольник). В ткачестве примера на рис. 6-1, в приведены переходные функции, соответствующие нормированным трапециям со значениями х, равными 0; 0,3 и1. Для каждой составляющей характеристики U3 (со) - трапеции (рис. 6-1, а) - находим три определяющих ее параметра: высоту f/gi (0) и частоты соог и cojj (рис. 6-1, б). По значениям соц и со; вычисляем коэффициент к- = (M,iJ(i)oi и в таблице находим соответствующую ему функцию h. (т). Искомую составляющую [t) получаем из нее путем умножения ординат h- (т) на величину Ui (0), поскольку (т) соответствует высоте, равной единице, и деления абсцисс, т. е. времени т, на величину Wq, так как длительность переходной характеристики обратно пропорциональна ширине частотной характеристики. С последним положением мы уже встречались в предыдуш,еп главе. Физически оно очевидно, а формально определяется общим свойством преобразования Лапласа (см. четвертую строку табл. 6-1), непосредственно следующим из выражения прямого или обратного преобразования. Описанный метод построения переходного процесса по действительной частотной характеристике системы применим для построения не только перехрдной характеристики h (t), т. е. реакции системы на единичное ступенчатое воздействие при нулевых начальных условиях, но, как было показано ранее, и переходной составляющей х (f) любого затухающего процесса, вызванного другими воздействиями и при любых начальных условиях. Если повторить проведенное выше преобразование выражения (6-25) в общем случае произвольной подынтегральной частотяохг функции X (jco), получим вместо выражений (6-29) и (6-30) аналогичные выражения, в которых вместо действительной (со) и мнимой Fg (о) частотных характеристик системы будут стоять действительная и лшимая части выражения jcoX (усо), т. е. соответственно - (aV (со) и (О f/,x-(oi), где Ux (со) и У(о)) - действительная и мнимая части функции  X (/ ) = W, (/со) F (/со) + (/со). (6-32) определяелюй но формуле (6-12) прп подстановке s = /w. Частотные функции X (/со), Ux (w) и (ю) называются обобщенными частотными функциям п. Таким образом, в случае рассмотренной выше методикп построения переходного процесса с помощью трапецеидальных частотных характеристик при произвольном воздействии и ненулевых начальных условиях вместо действительной частотной характеристики системы надо использовать грас)ик функции --coF. (о). Если при этом заранее неизвестно, что результат нострЬения представляет собой абсолютно интегрируемую функцию, формальным признаком применимости описанного метода построения переходного процесса по частотным характеристикам является нахождение всех полюсов подынтегральной функции X (s) [см. (6-12)] левее мнимой оси. Наряду с графическими методами построения кривых переходного процесса с помощью частотных характеристик имеются методы, использующие переходные характеристики отдельных звеньев системы. Время процесса в этом случае делится на достаточно малые интервалы. Кривая внешнего воздействия заменяется ступенчатой линией. В результате этого в пределах каждого интервала воздействие принимается постоянным. Выходная величина первого звена, на которое подано воздействие, определяется как сумма реакций на постоянные в течение каждого интервала ступенчатые воздействия. Полученная в результате кривая, которая является входным воздействием для следующего звена, в свою очередь, заменяется ступенчатой линией, и по ней аналогичным образом строится выходная величина второго звена. Далее последовательно определяются выходные величины следующих звеньев вплоть до последнего.В случае замкнутой системы выходная величина последнего звена прибавляется к внешнему воздействию, поданному на вход первого звена. Имеющееся при этом чистое временное запаздывание рассчитанного Taiam образом сигнала обратной связи относится к погрешности метода и уменьшается с уменьшением длины интервалов, т. е. шагов, на которые разбит процесс. Такое построение переходного процесса можно вести по переходным характеристикам отдельных звеньев и по их уравнениям. В последнем случае речь идет о численно-графическом решении дифференциального уравнения системы путем интегрирования его но шагам. Вместо графического построения это решение можно выполнить и чисто аналитически, т. е. методом численного интегрирования. В случае использования цифровых вычислительных машин для решения, дифференциальных уравнений САУ применяется по существу то же численное интегрирование, но осуществляемое уже автоматически вычислительной .машиной. Главным достоинством этих графических и численных методов построения переходных процессов является применимость их к нелинейным и нестационарным системам [5; 10]. Для линейных систем в большинстве случаев проще методы, основанные на использовании частотных характеристик. ГЛАВА СЕДЬМАЯ КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СВОЙСТВ И ПОРЯДОК СИНТЕЗА ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ § 7-1. НАЗНАЧЕНИЕ И ВИДЫ КОРРЕКЦИИ ДИНАМИЧЕСКИХ СВОЙСТВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Коррекция динамических свойств САУ осуществляется для выполнения рассмотренных выше требований по точности, устойчивости и качеству переходных процессов. С точки зрения требований к точности САУ в установившихся режимах коррекция динамических свойств САУ может понадобиться для увеличения порядка астатизма или коэффициента %(Р) %{р) Я{р) I-----1 передачи системы при сохранении устойчивости и определенного качества переходных процессов. Коррекция применяется также как средство обеспечения устойчивости неустойчивой системы или расширения области устойчивости, а также повышения качества переходных процессов. Осуществляется коррекция с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией. Принципиально корректирующие звенья могут включаться либо последовательно с основными звеньями САУ, либо параллельно им. Соответственно, по способу включения в систему корректирующие звенья делятся на последовательные О) ,-, , , - корректирующие звенья и параллельные. Сказанное иллюстрируется рис. 7-1. Здесь PFq (р) - передаточная функция основных звеньев системы, а w (р) и TF (р) - передаточные функции корректирующих звеньев. На рис. 7-1, а показано последовательное корректирующее звено. На рис. 7-1,6 и в приведены два возможных способа включения параллельных корректирующих звеньев. В дальнейшем, однако, будем рассматривать только последний вариант включения параллельного корректирующего звена (рис. 7-1, в), когда это звено То. с (р) образует местную обратную связь в системе. Это связано с тем, что в замкнутом контуре САУ корректирующее звено, изображенное на рис. 7-1, б, тоже может рассматриваться как обратная связь, но относительно другой части системы, показанной пунктиром. С другой стороны, схему на рис. 7-1, б можно свести и к последовательной коррекции (рис. 7-1, а), приняв за передаточную функцию корректирующего звена сумму PF (р) -f (р), включающую себя передаточную функцию (р) основного звена системы. Действие корректирующих звеньев сводится к созданию в системе следующих дополнительных воздействий: 1) воздействий по производным и интегралам в контуре САУ; 2) корректирующих обратных связей вокруг отдельных частей системы; 3) корректирующих воздействий в функции внешних воздействий и их производных. Дополнительные воздействия по производным и интегралам в контуре САУ или в функции внешних воздействий и их произ- %.с{р) Рлс. 7-1. Способы включения кор-- ректирующих звеньев в систему. ВОДНЫХ осуществляются с помощью последовательных корректирующих звеньев, корректирующие обратные связи - с помощью параллельных корректирующих звеньев. § 7-2. ПОСЛЕДОВАТЕЛЬНЫЕ КОРРЕКТИРУЮЩИЕ ЗВЕНЬЯ В КОНТУРЕ САУ Наибольшее применение получили следующие последовательные корректирующие звенья: пропорционально-дифференцирующее, пропорционально-интегрирующее, пропорционально-интегро-дифференцирующее. А. Пропорционально-дифференцирующее звено Идеальное пропорционально-дифференцирующее звено имеет следующую нередаточнуд) функцию: w,Ap)-K±Kp- :7-1) Отсюда видно, что у этого звена выходная величина содержит две составляющие - пропорциональную входной величине п определяемую коэффициентом и пропорциональную ее первой производной, определяемую коэффициентом к. Последняя составляющая может быть положительной или отрицательной. Существуют еще пропорционально-дифференцирующие звенья, дающие на выходе составляющую, пропорциональную и второй производной. Однако значительно чаще такую составляющую получают последовательным включением двух звеньев с передаточной функцией (7-1). Включение такого звена в САУ приводит к тому, что передаточная функция w ip) - r {p)IQ (р) разомкнутой системы умножается на передаточную функцию wJ (р) этого звена, т. е. принимает вид: В результате левая часть дифференциального уравнения системы получается такой: d{p) = r{p){k,±kp)-i-Q{p), (7-2) (?(p) = rtoP -f aip-i+ ... -f fl tp-brt . Так как обычно r (р) - к, видно, что введение дополнительного воздействия по производной с помощью пропорционально-дифференцнрующего звена позволяет изменить величину коэффициента прп р в первой степени в многочлене d (р). Прпменеппе пропорционально-дифференцирующего звена со второй производной плп двух последовательных звеньев с передаточной функцией (7-1) приводит к изменению коэффициента и у р- и т. д.
|