
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления иметь в ее составе хотя бы одно нелинейное звено, т. е. звено, описываемое нелинейным уравнением. Например, причинами нелинейности системы автоматического регулирования напряжения, изображенной на рис. В-2, в, могут быть насыщение генератора, делающее нелинейной зависимость напрянения генератора от тока возбуждения, нелинейная зависимость величины нагрузки от напряжения, не.линейная зависимость выходной величины от входной у какой-либо части регулятора. Для линейных систем справедлив принцип суперпозиции. Он заключается в том, что реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных на систему порознь. Принцип суперпозиции позволяет выразить реакцию системы на любое произвольное воздействие через реакцию системы на элементарное типовое воздействие, например, в виде ступеньки. Для этого достаточно представить данное входное воздействие в виде совокупности выбранных типовых воздействии. Благодаря принципу суперпозиции разработана общая теория линейных систем автоматического управления, описываемых линейными дифференциальными уравнениями любого порядка. К нелинейным системам иринцип суперпозиции не применим. Нет и общей теории нелинейных дифференциальных уравнений, на основе которой могла бы быть создана общая теория нелиней-. кых систем автоматического управления. Существует лишь ряд частных методов для решения некоторых видов нелинейных уравнений невысокого порядка. Вместе с тем, если не ограничивать диапазона изменения входных воздействий, то все реальные системы автоматического управления оказываются нелинейными. Трудность исследования нелинейных систем заставляет упрощать их описание. Желательным пределом такого упрощения является приблинхенное описание их линейными уравнениями, хотя бы в некоторых из интересующих нас режимов. Это называется линеаризацией нелинейных систем. В тех случаях, когда линеаризация невозможна, прибегают к, приближенным методам исследования нелинейных систем с учетом их нелинейностей. Д. Системы стационарные и нестационарные Стационарной называется система, все параметры которой не изменяются во времени. Нестационарная система - это система с переменными параметрами. При математическом описании нестационарной системы это проявляется в том, что некоторые; коэффициенты дифференциального уравнения системы являются функциями времени. В соответствии с данным определением, в отличие от нестационарной системы, реакция стационарной системы на одно и то . же воздействие не зависит от момента приложгения этого воздействия. Б. Системы непрерывного и дискретного действия САУ бывают непрерывного или дискретного действия в зависимости от характера действия составляющих систему звеньев. Система непрерывного действия, или, короче, непрерывная система, состоит только из звеньев непрерывного действия, т. е. звеньев, выходная величина которых излйняется плавно при плавном изменении входно!! величины. Система дискретного действия, или дискретная система, - это система, содержащая хотя бы одно звено дискретного действия. Звеном дискретного действия называется звено, выходная величина которого изменяется дискретно, т.е. скачками, даже при плавном изменении входной величины. (Скачки выходной величины могут происходить либо при прохождении входной величиной определенных пороговых значений - звено релейного, действия, либо через определенный интервал времени - звено импульсного действия.) Ж. Адаптивные и неадаптивные системы Адаптивные, или самоприспосабливающиеся, системы обладают способностью приспосабливаться к изменению внешних условий работы, а такне улучшать свою работу по мере накопления опыта. .Неадаптивные, или, как их еще называют, обыкновенные, системы такой способностью не обладают. Они имеют постоянную настройку. Если вследствие какого-либо изменения условий работы обыкновенной системы ее настройку требуется изменить для того, чтобы, сохранить заданное качество управления (например, точность, быстродействие), эту перенастройку должен сделать человек. В случае адаптивной системы это осуществляется автоматически самим управляющим устройством системы. . Область применения адаптивных САУ - это управление объектами, свойства или условия работы которых недостаточно известны или существенно непостоянны. В этих условиях обыкновенная, неадаитивная, система либо будет работать неудовлетворительно, .либо потребует постоянного надзора. В заключение остановимся на общей характеристике процессов, происходяш,их в системах автоматического управления. Как и у всякой динамической системы, процессы в САУ делятся на установившиеся и переходные.. На рис. В-3 показаны два варианта переходного процесса в системе регулирования напрянления генератора, изображенной на рис. В-2, в. До момента изменения нагрузки генератора, вызвавшего переходный процесс, регулирования напряжения, и по окончании этого процесса в системе имеет место установившийся процесс, харак- теризуемый постоянством внешних возмущ,ений и других условий работы системы. При рассмотрении процессов в САУ ваншое значение имеют следующие понятия: устойчивость системы, качество процесса унравления и точность управления. Устойчивость - это свойство системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким-либо возмущением. Замкнутые САУ, как всякие замкнутые системы, весьма склонны к потере устойчивости, что чаще всего проявляется в возникновении расходящихся колебаний (генерации). Например, такая неустойчивость слстемы регулирования напряжения генератора, изображенной на рис. В-2, в, выразится в возникновении колебаний напряжения генератора со все возрастающей амплитудой. Переходные процессы, показанные на рис. В-3, соответствуют устойчивой системе, поскольку отклонения напряжения со временем не возрастают, а уменьшаются, затухают. Если отбросить особые случаи, можно сказать, что устойчивость является необходимым условием работоспособности всякой САУ. Качество процесса управления характеризуется тем, насколько процесс управления близок к желаемому. Количественно оно определяется критериями качества, которые выбираются в соответствии с целью управления. Например, для упомянутой выше системы регулирования напряжения генератора качество может оцениваться такими критериями, как величина максимального отклонения напряжения генератора, вызванного скачком нагрузки, колебательность переходного процесса, его длительность. Точность управления характеризуется погрешностью системы в установившихся режимах. Например, для системы регулирования напряжения генератора . точность определяется величиной установившегося отклонения напряжения генератора от заданного значения по окончании переходного процесса. С учетом- рассмотренной классификации систем автоматического управ-чения ниже принят такой порядок изложешш. В начале, в первой части, книги дается теория обыкновенных линейных САУ непрерывного действия. Во второй части излагаются общие вопросы теории нелинейных САУ. Третья часть посвящена теории дискретных систем, а в четвертох!, последней, части описываются адаптивные системы. Основным предметом рассмотрения, связывающим все части книги, являются одномерные замкнутые системы автоматической стабилизации. ЧАСТЬ ПЕРВАЯ теория линейных систем автоматического управления непрерывного действия ГЛАВА ПЕРВАЯ математическое описание линейных систем автоматического управления § 1-1. ПОСТАНОВКА ЗАДАЧИ. РАЗБИЕНИЕ СИСТЕМЫ НА ЗВЕНЬЯ Целью рассмотрения системы автоматического управления может быть решение одной из двух задач - задачи анализа системы или задачи синтеза. В первом случае дается система, включая значение параметров, и требуется определить ее свойства. Во втором случае, наоборот, задаются свойства, которыми должна Х)бладать система, т. е. требования к ней, и необходимо создать систему, удовлетворяющую этим требованиям. Очевидно, что задача синтеза много сложнее задачи анализа унге из-за ее неоднозначности, ч В самом общем виде порядок исследования САУ в обоих случаях включает математическое описание системы, исследовашае ее установившихся режимов и исследование переходных режимов. Математическое описание системы начинается с разбиения ее на звенья и онисания этих звеньев. Последнее может осуществляться либо ана.читически в виде уравнений, связывающих входные ивыходные величины звена, либо графически в виде характеристик, описывающих ту же связь. По уравнениям или характеристикам отдельных звеньев составляются уравнения или характеристики системы в целом, на основании которых и исследуется система. Выше при рассмотрении принципа действия систем автоматического управления было дано понятие о функциональной схеме САУ (см. рис. В-1, б). В функциональной схеме система разбита на Звенья исходя из выполняемых ими функций, т. е. назначения. Для математического описания систему разбивают на звенья по другому принципу, а именно - исходя из удобства получения этого описания. Для этого систему следует разбивать на возможно более простые ((шелкие ) звенья, но вместе с тем необходимо, чтобы они обладали направленностью действия. Звеном направленного действия называется звено, которое передает воздействие только в одном направлении -- со входа на вход так что изменение состояния такого звена не влияет на состояние предшествующего звена, работающего на его вход. В результате при разбиении системы на звенья направленного действия /математическое описание каждого такого звена может быть составлено без учета связей его с другими звеньями. Соответственно .математическое описание всей системы в целом монет быть получено как совокупность составленных независимо друг от друга уравнений, или характеристик отдельных звеньев, образующих систему, дополненных уравнениями связи между звеньями. W В результате разбиения Рис. 1-1. Разбиение на звенья системы автоматического регулирования напряжения синхронного генератора. САУ на звенья направленного де11ствпя и получения математического описания звеньев составляется структурная схема системы. Структурная схема системы состоит из прямоугольников, изображающих звенья схемы, и стрелок, соединяющих выходы и входы звеньев согласно связям между звеньями в системе. Стрелками показываются также внешние воздействия, приложенные к отдельным звеньям системы. Каждому звену структурной схемы придается описывающее его уравнение или xapaii-теристика. При этом уравнение обычно записывается прямо на схеме внутри изображающего звено прямоугольника в виде передаточной функции (см. § 1-2). Получение структурной схемы является конечной целью математического описания системы. В качестве примера на рис. 1-1 показано разбиение на звенья системы автоматического регулирования напряжения синхронного генератора, изображенной на рис. В-2, в. При этом принято, что усилитель регулятора состоит из двух частей - усилителя напряжения . УЯ и усилителя мощности УМ в виде, например, электромашинного усилителя. Каждый из этих усилителей обладает направленностью действия и поэтому может быть выделен в виде отдельного звена. На рис. 1-1 стрелками показаны внешние воздействия - задающее воздействие Пз и возмущение в виде нагрузки Рг на зажимах генератора. На этом же рисунке в виде кружочка, разделен- ного на секторы, дано условное изображение элемента сравнения, т е. суммирующего элемента, выявляющего разность At/ = - Ц. Зачерненный сектор соответствует вычитаемому сигналу. Для большей наглядности рядом показаны еще и знаки сигналов (плюс у Пз п минус у £/). § 1-2. УРАВНЕНИЯ ЗВЕНЬЕВ СИСТЕМЫ. ЛИНЕАРИ3.4ЦИЯ Основная сложность, которая существует при выводе уравнений звеньев системы, заключается в необходимости установления допустимой степени идеализации и упрощения звеньев. Главным упрощением, к которому следует стремиться при выводе уравнений звеньев системы, является их линеаризация, т. е. описание линейными дифференциальными уравнениями. Линеаризация нелинейности, содержащейся в уравнении звена, заключается .в замене этой нелинейности приближенной .линейной зависимостью. Рассйютрим звено, описываемое нелинейной статической зависимостью У = Ф (Z) (рис.. 1-2, а). Пусть установившийся режи.м звена соответствует значениям входной и выходной величин Xq и Yq (рис. 1-2; б) и отклонения Z от Хо в процессе работы звена достаточно малы. В этом случае исходную нелинейную зависимость У = Ф (Z) можно разложить в ряд Тейлора в окрестностях точки установившегося режима и, отбросив члены ряда выше первого порядка Малости, получить следующую приближенную зависимость: 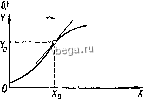 Рис. 1-2. Линеаризация статического звена. Уя ф(Zo)-f(д\(X-X ), (1-1) где [j - значение производной функции ф {X) поХ при подстановке в выражение этой производной X = Xq. Это уравнение можно переписать в таком окончательном виде: АУя/iAZ, ДХ = Х -Хо; ДУ = У -Уо; /с = (1-2)  Проведенная линеаризация имеет простую графическую ин-терпретацрпо: она соответствует, как показано на рис. 1-2, б, замене действите.льной нелинейной характеристики касательной к ней в точке, соответствующей установившемуся режиму. Коэф-
|