
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления (см. § 1-3). Характеристики на рис. 5-1, а соответствуют внешнему воздействию в виде возмущения, а на рис 5-1, б - в виде изменения задающего воздействия, в соответствии с которым выходная величина х системы по окончании переходного процесса управления получает приращение х,.. Качество переходных процессов численно характеризуется следующими п о к а з а т е л я хМ и качества. Время переходного процесса t. Оно характеризует быстродействие системы и определяется как интервал времени от начала переходного процесса до момен-. та, когда отклонение выходной величины от ее нового установившегося значения становится меньше определенной достаточно малой величины. Обычно в качестве последней берут 5% максимального отклонения в переходный период. Максимальное отклопенпс в переходный период. В случае переходных процессов, вызванных возмущением (рис. 5-1, а), максимальное отклонение определяется величиной хмакс1, приходящейся на единицу возмущения f = i [t). В случае переходных процессов, вызванных изменением задающего воздействия (рис. 5-1, б), максимальное отклонение определяется относительно нового установившегося значения Жс п равно в процентах  Рис. 5-1. Переходные характеристики САУ. 100. (5-1) Заметим, что эта величина аналогична предыдущей, поскольку здесь Хрт, пропорционально задающе.му воздействию, Величина а часто называется перерегулированием. Колебательность переходного процесса. Эта характеристика переходного процесса обычно определяется числом колебаний, равным числу минимумов кривой переходного процесса в интервале времени t, или в случае кривых, как на рис. 5-1, б, - ч и с л о м перерегулирований за этот же интервал. Иногда колебательность переходного процесса оценивают отношением соседних максимумов х, г/макс I- Эта величина так и называется колебательностью и выражается в процентах. Незатухающие колебания при этом соответствуют колебательности 100%. Колебательность стремится к нулю при уменьшении до нуля второго максимума переходной характеристики, когда получается неколебательный процесс. Обычно приемлемым числом колебаний в САУ считается 1-2. Однако бывают системы, в которых колебательность не допускается совсел!. С другой стороны, в ряде систем иногда допускаются три п более колебаний. При выборе структурной схемы и значений параметров САУ ц процессе ее синтеза выполнение требований в отношении перечисленных показателей качества переходного процесса заставляет искать компромисса в связи с противоречивостью этих требований. Так, например, если в рассмотренной в предыдущей гтлаве системе, состоящей из трех статических звеньев первого порядка (область устойчивости системы показана на рис. 4-6, г), установить достаточно малый коэффициент передачи, переходная характеристика системы будет неколебательной и плавной вроде характеристик 1 на рис. 5-1, а и б. При увеличении коэффициента передачи переходные характеристики сперва примут вид характеристик 2, а затем характеристик 3 (рис. 5-1, а и б), т. е. при этом будет увеличиваться быстродействие системы (уменьшаться fj,. но одновременно с этим появится и будет нарастать колебательность. При дальнейшем увеличении коэффициента передачи вплоть до его критического по устойчивости значения, соответствующего границе устойчивости, колебательность ностепенно возрастет до 100%. Вследствие этого одновременно и длительность переходного процесса f, которая вначале уменьшалась, начнет вновь нарастать до бесконечности. Максимальное отклонение х в переходном, процессе, вызванном возмущением (рис. 5-1, а), уменьшается с ростом коэффициента переда-1ш. Зато при этом по мере роста колебательности- -возникает и увеличивается перерегулирование переходного процесса, вызванного изменением задающего воздействия (рис. 5-1, б). В общем случае произвольного внешнего воздействия переходный процесс X (О в системе, обусловленный этим воздействием. представляет собой решение уравнения (4-1): D{p)x = M{p)f, т. е. имеет вид (4-2): где по (4-3) ж(/) = Жу (0 + п(0, При ЭТОМ, очевидно, качество переходного процесса будет зависеть не только от собственных свойств системы, но и от самого внешнего воздействия (места его приложения, величины, характера изменения во времени), что определяет правую часть уравнения (4-1). Кроме того, качество переходного процесса будет зависеть также от начальных условий, т. е. от состояния системы Б момент приложения воздействия. Это сказывается на постоянных интегрирования С; в решении (4-3). В одной и той же системе переходныг! процесс при одном воздействии может быть совсем неколебательным, а при.другом - иметь недопустимо больнтую колебательность. Более того, переходный процесс, вызванный одним и тем же во.здействпем, лгожет в широких пределах изменять свои показатели при пзд[ененпи начальных услови!!. Например, может оказаться, что при нулевых начальных условиях единственная колебательная составляющая переходного процесса, входящая в И Cei решения для x {t), имеет очень малую постоянную интегрирования С- и ноэтодгу практически не сказывается на кривой переходного процесса , который получается монотонным. И влгесте с этим при некоторых других начальных условиях эта составляющая может возрасти и оказаться доминирующей в общей сумме составляющих, длая весь процесс существенно колебательным. Таким образо.м, при оценке качества переходных процессов в САУ необходимо оговаривать воздействие и начальные условия, при которых имеет дгесто данное качество. При общей характеристике качества переходных процессов в системе его обычно оценивают для единичного ступенчатого воздействия при нулевых.начальных условиях, т. е. для переходной характеристики, причем ото делается для основного внешнего воздействия (пли нескольких основных воздействий, например для одного основного возмущения и для задающего воздействия). Исчерпывающее представление о качестве переходных процессов дает, естественно, са.ма кривая процесса х (t). Однако при синтезе систем необходимо иметь возможность судить об основных показателях качества переходных процессов в системе без построения процессов, по кактш-либо косвенным признакам, которые определяются более просто, чел[ кривая х (t), и, кроме того, позволяют связать показатели качества непосредственно со значениями параметров систедгы. Такие косвенные признаки разработаны и называются критериями качества переходных процессов.. При исследовании качества переходных процессов они играют ту же роль, что и критерии устойчивости при исследовании устойчивости САУ. Существуют три группы критериев качества - частотные, корневые п интегральные. Ниже они будут рассхмотрены последовательно. § .-2. Ч.4СТ0Т11ЫЕ КРИТЕРИИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ Эти критерии позволяют судить о качестве переходных процессов по частотным характеристикам систедп,!. При этом могут использоваться разные частотные характеристики замкнутой си-.стелив. 1J8 - Для минимально-фазовых спсте.м качество переходных процессов мо/кет быть оценено по амплитудной характеристике замкнутой системы А. (со) (рис. 5-2, а). Как известно (см. § 1-3), у таких систем а. ч. х. и ф. ч. х. однозначно связаны и, следовательно, по одной а. ч. X. можно полностью определить все свойства спстемы, в тоМЧисле и качество переходных процессов. -По а. ч. X. можно оценить колебательность и длительность переходной характеристики системы. Колебательность определяется по величине максимума характеристики, который ноэто.му относительного называется по- казателем А, колебательности: макс а (Ср) ~ 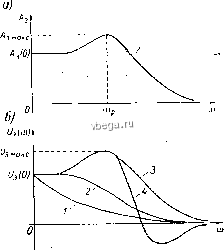 3 (0) (0) При М переходная характеристика системы неколебательна. 4ejM больше М, тем больше колебательность. При М -> оо колебательность возрастает.до получения незатухающих колебаний, соответствующих нахождению системы на границе устойчивости. Действительно, поскольку /1з (со) представляет собой модуль Из (/со), тот факт, что As (со) -> оо, означает, что передаточная функция задпчнутой спстемы имеет пару сопряженных мнимых полюсов ±/сОр, и, следовательно, в системе существуют незатухающие Колебания с частотой о)р. С такой связью колебательности с относительным максимумодг а. ч. х.-мы уже познакомились ранее на примере типового колебательного звена (см. § 1-4, рпс. 1-8). Оптимальным обычно считается М = 1,1 -ь- 1,5. При этом переходная характеристика имеет слабую колебательность с частотой, близкой частоте о)р резонансного ппка а. ч. х. Для более точной численной оценки колебательности надо учитывать под!пмо величины М еще и другие свойства характеристики Аз (оз). Соответствующие формулы для определения качества можно найтн в работе 14]. Длительность f переходной характеристики определяется ишриной частотной характеристики А (со). При этом зависимость здесь такая: чем шире частотная характеристика системы, тем короче ее переходная (временная) характеристика, т. е. тем меньше t,.. Рис. 5-2. Частотные критерии качества переходных процессов. с такой обратной зависимостью мы уже знакомы по типовым звеньям (см. § 1-4). Так, в случае статического звена первого порядка с передаточной функцией ширина а. ч. х. обратно пропорциональна постоянной времени Т звена. (Вспомним, что сопрягак)Ш,ая частота, соответствующая началу спадания л. а. х., равна 1/7 - см. рис. 1-7.) В то же время длительность переходной характеристики 3 Тт. е. прямо пропорциональна Т. У колебательного звена второго порядка с передаточной функ- дпей , . . длительность частотной характеристики и i аналогично связаны через постоянную времени Tj, определяющую инерционность звена. В первом приближении длительность переходной характеристики может быть оценена по величине резонансной частоты сОр. Так как частота колебаний переходной характеристики примерно равна (Ор, время it a c достижения первого максимума переходной характеристикой близко половине периода колебаний этой частоты, т. е. .макс-. (5-2) Если при этом предположим, что переходная характеристика системы в течение имеет 1-2 колебания, = (1-ь2)-. (5-3) Формулы для более точной оценки длительности переходно!! характеристики по (ю) имеются в работе [4]. Хотя приведенные выше численные оценки качества переходных характеристик относятся к минимально-фазовым системам, однако в первом приближении они могут быть применены и к неминимально-фазовым системам. При этом возможная погрешность тем больше, чем больше фазовая характеристика системы отличается от минимально-фазовой характеристики, соответствующей данной а. ч. х. Показатель колебательности М и резонансная частота Юр а. ч. X. замкнутой системы могут быть определены и неиосредст-венно но частотным характеристикам разомкнутой спстемы исходя из известной связи между характеристиками замкнутой и разомкнутой систем, определяемой следующим выражением для амплитудно-частотной функции: 3(/o3) = rqrHW)- На основании этой связи предложены графические приемы и -составлены номограммы для определения указанных выше показателей а. ч. X. замкнутой системы по а. ф. ч. х. или л. а. х. разомкнутой системы [4; 101. При использовании этих приемов и номограмм необходимо учитывать, для какой передаточной функции W. (р) они рассчитаны. Как правило, принимается W (р) = W (р). В приложении 3 дан ряд номограмм для определения качества переходной характеристики по л. а. х. разомкнутой системы. В нервом приближении длительность и колебательность переходной характеристики замкнутой системы могут быть оценены непосредственно по частоте среза и величинам запасов по фазе и по амплитуде, определенным по л. а. х. разомкнутой системы. При этом в случае колебательной переходной характеристики резонансная частота Юр а. ч. х. замкнутой системы близка частоте среза (Ос л. а. х. разомкнутой системы. Поэтому значения акс и ?п могут быть определены по формулам (5-2) и (5-3) при подстановке в них (з}.. В случае неколебательной переходной характеристики Что касается колебательности, то, как уже указывалось в § 4-5, считается, что переходная характеристика имеет достаточно лшлую колебательность, если запас по фазе не менее 30°, а запас по амплитуде не менее 6 дб, что соответствует 2 в линейном масштабе. В случае минимально-фазовой системы для оценки колебательности достаточно иметь одну л. а. х. Колебательность считается допустимой, если на частоте среза, т. е. в точке пересечения с осью абсцисс, л. а. х. имеет наклон не более 20 дб/дек. При этом чем шире участок с таким наклоном, тем меньше колебательность. В частности, при ширине этого участка около одной декады и нахождении частоты среза ближе к его концу перерегулирование в системе не будет превышать 20-30%. - - Приведенные оценки качества переходных процессов в замкнутой системе по л. а. х. разомкнутой системы справедливы для случая Wfy.{p) = W (р), характерного, например, для следящих систем. В общем случае произвольной передаточной функции /х (Р) и особенно при ненулевых начальных условиях этими оценками можно пользоваться только как сугубо ориентировочными. При этом погрешность будет тем больше, чем значительнее (р) отличается от W (р). Однако для минимально-фазовых систем при W (р) = IV (р) с помощью л. а. х. разомкнутой системы наиболее просто выполняется как анализ качества переходных процессов, так и синтез САУ на заданное качество. Общий порядок синтеза при этом следующий. 1. Определение требуемой л. а. х. САУ, т. е. л. а. х., при которой выполняются заданные требования к качеству переходных процессов. Собственно, качество, как и устойчивость, определяется не всей, а среднечастотной частью л. а. х., расположенной в районе частоты среза. Как было сказано, наклон
|