
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Выведенные соотношения (3-31), (3-35) и (3-34), (3-36) позволяют находить корреляционные функции илп спектральные плотности выходной величины системы по известным корреляционным функциям или спектральным плотностям входных воздействий. Таким образом, с их помощью может быть решена задача анализа точности системы автоматического управления при стационарных случайных воздействиях на нее. Эти соотношения дают возможность решать и задачу синтеза САУ па заданную точность прп статистически заданных внешних воздействиях. При решении обеих задач в качестве характеристики стационарной случайной функции более просто брать спектральную плотность, поскольку это позволяет использовать графические методы исследования, основанные иа ирименепии частотных характеристик. Рассмотрим вначале задачу анализа точности САУ при стационарных случайных воздействиях. По формуле (3-34) или в случае двух воздействий но формуле (3-36) можно определить спектральную плотность Sxo (со) центрированного стационарного процесса на выходе системы по заданным спектральным плотностям входных воздействий. Затем но формуле (3-26) может быть определена дисперсия, характеризующая стационарную погрешность системы: Интеграл от спектральной плотности определяют графически или численным интегрированием. Для облегчения последнего процесса в приложении 2 приведены готовые формулы [8]. При применении этих форму.л выражение для спектральной плотности оыходной величины х предварительно приводится к следующему виду: (3-37) где h - постоянный множитель, а многочлен G (о) имеет степень ниже 2/г, если п - степень многочлена Я (/со). Представление So (со) в виде выражения (3-37) возможно практически для ,пюбой реальной устойчивой системы. Задача синтеза САУ но условию обеспечения требуемой точности в стационарном случайном режиме заключается в определении передаточной функции системы, при которой выполняется неравенство оэ - со где дд, - предельно допустимое значение дисперсии выходной величины системы, а So (со) определяется амплитудной частотной характеристикой системы и спектральной плотностью воздействия согласно (3-34) или в более общем случае согласно (3-36). Если при синтезе системы по условию обеспечения требуемо11 точности в детерминированном стационарном режиме задача сводится к определению порядка астатизма и коэффициента передачи, то в рассматриваемом случае стационарного случайного режима точность системы определяется всей передаточной функцией системы. Задача синтеза поэтому существенно усложняется, требуя определения амплитудной частотной характеристики системы, при которой выполняется неравенство D. j. Общий порядок синтеза частотной характеристики системы сводится к следующему. Прежде всего находится частотная характеристика известной части системы, которая включает в себя объект управления, а также связанные с ним звенья управляющего устройства. Затем с помощью выведенных выше выражений, связывающих амплитудную частотную функцию системы с заданной дисперсией д(, и спектральной плотностью S, определяется, как надо скорректировать частотную характеристику известной части системы, чтобы обеспечить требуемую точность. В результате находится частотная характеристика неизвестной части управляют 1Ц0Г0 устройства, по которой далее определяется соответствующая передаточная функция. Подробно методы синтеза САУ бдут изложены в седьмой главе. Здесь же остановимся еще на одном специфическом вопросе, связанном с синтезом САУ по требованию точности в стационарных случайных режимах. Когда все случайные воздействия, приложенные к системе, являются либо возмущениями, т. е. помехами, либо задающими воздействиями, теоретически соответствующим выбором передаточной функции можно обеспечить любую точность системы. Однако в случае, когда к системе одновременно приложены оба вида воздействий, т, е, как возмущения, так и задающие воздействия, существует оптимальное выражение для передаточной функции системы, однозначно определяемое спектральными плотностями внешних воздействий и обеспечивающее* минимум дисперсии D., меньше которого она не может быть сде.чана, если не выходить из рамок линейных систем. Таким образом, в этом случае не всякие требования по точности могут быть практически реализованы в линейной САУ. Поэтому, если эти требования достаточно жестки, задача синтеза системы должна решаться как задача обеспечения минимума дисперсии выходной в е л н-ч и п ы и определения соответствующей оптимальной нередаточ-пой функции системы. Покажем вначале, что в рассматриваемом случае действительно существует минимум D.. Если привести возмущение / к точке приложения задающего сигнала Жз, система примет вид, изображенный на рис. 3-5, а. Дисперсия выходной величины соответственно с принципом суперпозиции при взаимной независимости х и / а- = (.).хИ-(.)/- Здесь первая составляющая {Dx)x3 определяет погрешность изме-пенпя величины х в соответствии с заданием х при отсутствии /, а вторая составляющая {DJ - погрешность, вызванную отклонением X от задания под действием возмущения /. На рис. 3-5, б приведены в качестве иллюстраций примерные графики обеих составляющих и полной дисперсии в функции полосы пропускания системы со для случая, когда спектр возмущения является белым, т. е. мощность равномерно распределена по всем частотам (рис. 3-5, в). С увеличением полосы пропускания о) системы величина (£,)д-з уменьшается вследствие улучшения условий прохождения сигнала х. При этом особенно существенно 0J Г-
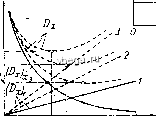 Рис. 3-5. К синтезу системы при воздействии случайных задающего воздействия и возмущения уменьшается {D), пока полоса пропускания системы еще уже полосы частот, занимаемой спектром 5, (со). Дисперсия (£>,)/ при этом, наоборот, возрастает, так как увеличивается та часть спектра возмущения, которая проходит на выход системы. Полная дисперсия D. имеет минимум при определенной полосе пропускания со системы. Величина ю уменьшается при увеличении уровня возмущения S (см. пунктирные кривые 2 пЗ на рис. 3-5, б). Соответственно при этом возрастает мхшпмум D. Если спектр (со) начинается ие с нулевой, а с некоторой конечной частоты coj (нунктпрная кривая 4 па рис. 3-5, в), кривая {DJf па рис. 3-5, б начинается не с начала координат, а с этой частоты, и оптимальное значение со (точка с0,4 на рис. 3-5, в) будет лежать между этим зпачением Wi и максимальной частотой спектра S. (od), причем тем ближе к последней, чем пиже уровень возмущения. Также между концом спектра S (со) и началом спектра Sf (со) будет находиться оптимальное значение со (точка со па рис. 3-5,й), если последний спектр начинается правее конца спектра 5. (со) (пунктир 5 на рис. 3-5, б), т. е. если оба спектра не имеют общей части. Изложенное можно доказать строго, выразив дисперсию через спектральные плотности воздействий и амилитудпую частотную характеристику системы согласно (3-36а) или (3-36), если существует взаимная корреляция между х (t) и / (t). Исходя из этих выражений, можно в общем виде вывести выражение для оптимальной передаточной функции системы через спектральные плотности / и Жз, обеспечивающее минимум Для возмущения f (t), приведенного в точку приложения Ха (t), Н. Впнером получено выражение для оптимальной передаточной функции системы. При этом задача системы сформулирована в общем виде как задача преобразования задающего воздействия согласно уравнению o = Wo{p)x, где Wo {р) - заданная передаточная функция. Оптимальная амплитудно-фазовая частотная характеристика системы, обеспечивающая минимум дисперсии для {х - х), т. е. минимум М 1{х - х1)], at оо ¥(-/cd) e rfco. (3-38) Здесь (/со) и W (-/Чо) определяются спектральной плотностью (со) полного входного воздействия (жз -f/) из следующего соотношения: Ч>- (/(О) ¥ (-/со) = i W (/со) i = 5(, + /) (со) = = 5,3 (со) + Sf (со) + S,f (со) + 5/,з (со). (3-39) Взаимная спектральная плотность между х и полным входным сигналом (жз -f /) о(-з-Ь/)(®) = хрз Н + хо/ (со). В частном случае, когда И (р) = 1 (например, для следящей системы, задачей которой является воспроизведение на выходе системы входного сигнала х), Xq = Жз! Sx(x + n ( ) = хз ((О) + 5,/ (СО). Прп отсутствии корреляции между Жд и /, если при этом хотя бы одна из этих функций является центрированной, последнее выражение предельно упрощается: 5ао(Хз + /)(со)- з(со). Если, например, в последнем случае возмущение / представляет собой белый шум, т. е. 5 (со) = 5/ const, причем его уровень много больше полезного сигнала Жд, т. е. SS.{(ii), в формуле (3-39) 5(.3+Л (со) = (со) -I- Sf (со) 6 ; - const и, согласно выражешио (3-38), 1 ? гЛ ) Таким образом, в данном случае оптимальная частотная характеристика в нервом приближении пропорциональна спектральной плотности задающего воздействия, т. е. повторяет его кривую. Такой вывод при очень высоком уровне возмущающего воздействия физически очевиден. Более подробно об определении оптимальной передаточной функции линейных САУ в стационарных случайных режимах можно прочесть в работе [9]. Отметим, что нахождение оптимальной передаточной функции не следует рассматривать как полное решение задачи синтеза системы. Во-нервых, найденная теоретически оптимальная передаточная функция чаще всего не может быть реализована в силу своей сложности, и поэтому результаты такого синтеза надо рассматривать как теоретически возможный предел, к которому следует стремиться и, знание которого позволяет оценить степень совершенства практически реализованной системы. Во-вторых, при синтезе системы, помимо точности в режимах со стационарными случа1гаыми воздействиями, необходимо принимать во внимание и другие требования, а именно: требования к точности в стационарных детерминированных режимах и к качеству переходных процессов. Кроме того, к системе предъявляется и ряд других требований и ограничений, связанных с энергетическими соображениями, условиями эксплуатации и т, п. Поэтому синтез САУ - это всегда комплексная задача, при решении которой надо учитывать целый ряд требований. Как уже отмечалось, основные методы и порядок синтеза САУ будут рассмотрены в седьмой главе. ГЛАВА ЧЕТВЕРТАЯ УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ § 4-1. ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ В предыдущих двух главах исследовались установившиеся процессы в САУ. В настоящей главе переходим к рассмотрению переходных процессов. В этой главе будет рассмотрено общее свойство переходных процессов в САУ, связанное с понятием устойчивости. Исследованию более детальных свойств переходных процессов, связанных с понятием их качества, будет- посвящена следуюш,ая, пятая глава. Устойчивость - это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия. 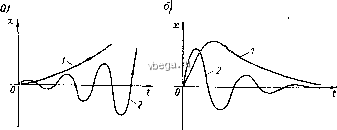 Рпс. 4-1. К понятию устойчивости системы. На рис. 4-1 показаны типичные кривые переходных процессов в неустойчивой (рис. 4-1, а) и устойчивой (рис. 4-1, б) системах. Если система неустойчива, то достаточно любого толчка, чтобы в ней начался расходящийся процесс ухода из исходногс) установившегося состояния. Этот процесс может быть апериодическим (кривая 1 на рис. 4-1, а) или колебательным (кривая 2 на рис. 4-1, а). Апериодический расходящийся процесс может, например, возникнуть в САУ, если в ее управляющем устройстве ошибочно переключить полярность воздействия на объект, в результате чего управляющее устройство будет осуществлять не отрицательную, а положительную обратную связь вокруг объекта. При этом управляющее устройство будет не устранять отклонение ж, а действовать в обратном направлении, вызывая лавинообразное его изменение. Колебательный расходящийся процесс, как будет показано далее, может настзшить, например, при неограниченном увеличении коэффициента передачи системы, вследствие чего управляющее устройство станет излишне энергично воздействовать на объект, 4 Е. и. Юревич
|