
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления Из ранее изложенного следует, что статическое отклонение уменьшается при увеличении коэффициента передачи системы. Однако, как видно из выражения (2-2), для полного устранения статичес-} ого отклонения при этом требуется уве.личивать коэффициент передачи до бесконечности. Вместе с тем имеются другие пути полного устранения статического отклонения в системе при конечном значении коэффициента передачи. Для того чтобы выяснить эти пути, обратимся вновь к общему выражению для а;., получаемому через передаточную функцию путем подстановки в нее р = 0: а: = И (2-6) При наличии /р,р статическое отклонение будет отсутствовать, если при р = О выражение [р) обратится в пуль. Согласно выражению (2-6), принципиально это возможно в двух случаях: если FF (0) = оо или если Wf (0) = 0. Оба пути практически могут быть реализованы. При этом, как будет показано ниже, первый путь реализуется введением в систему интегрирующего звена, т. е. переходом к так называемой астатической системе управления, а второй - введением компенсирующего воздействия по возмущению. Применение астатической системы управления. Введем в рассматриваемую статическую САУ интегрирующее звено, причем так, чтобы оно находилось вне участка системы от места приложения / до X, т. е. чтобы его передаточная функция не входила в Wf (р). В этом случае, как следует из (2-6), статическое отклонение будет равно нулю, так как при конечном значении И. (0) = = имеем W (0) = ос из-за наличия в знаменателе W (р) множителя р, обязанного своим появлением передаточной функции к/р интегрирующего звена. Наличие интегрирующего звена между точками нахождения / и X, т. е. в составе передаточной функции Wf (/?), не устраняет Жрт- Чтобы показать это, приведем выражение (2-6) к следующему виду: WfAp) . уПуО) /ст i /с l + W{p) р = 0 i + Uv{p) Здесь W (р) и Wfx (р) - передаточные функции W (р) и Wf. (р) после выделения из их знаменателей множителя р, обязанного СВОИМ появлением интегрирующему звену, т. е. W{p)---W\py, WfAp)= jW;,ip), причем W (0) = к, а (0) = к. Отсюда /ст h. /ст> (2-7) т. е. в данном случае существует статизм o,= = f. (2-8) Обратим внимание на то, что выражение (2-8) отличается от выражения (2-3), выведенного для статической системы, отсутствием единицы в знаменателе. Таким образом, условием устранения статического отклонения является наличие интегрирующего звена в системе вне участка, описываемого передаточной функцией Wf (р). Система автоматического управления, структурная схема которой после приведения ее к одноконтурному виду содержит интегрирующее звено, называется астатической системой. Астатической система может.быть благодаря наличию астатического управляющего устройства или астатического объекта. В первом случае интегрирующее звено имеется в составе управляющего устройства, а во втором - в составе объекта. Если астатическим является управляющее устройство, все возмущения, приложенные к объекту управления, не будут создавать статического отклонения его выходной величины х. Если астатическим является объект управления, все возмущения, приложенные ко входу объекта, будут вызывать статическое отклонение Жст, определяемое выражением (2-8). Однако в характерном, например, для следящих систем случае, когда интерес представляет статическая ошибка Вст, вызванная задающим воздействием, она устраняется и за счет астатизма объекта. Действительно, при этом 1 ст = 1 W (0) 3 поскольку передаточная функция интегрирующего звена не входит в числитель последнего выражения. Вывод о том, что для устранения надо в системе иметь интегрирующее звено вне W (р), был сделан выше в предположении, чтоЖу (р) не содержит интегрирующих звеньев, т. е. W{0) конечно и равно kfx. Покажем, что этот вывод справедлив прп любом ТУ(р), в том числе и при наличии в Wf{p) интегрирующих звеньев. Итак, пусть в выражении  1 -Ь W (р) в (р) входит I интегрирующих звеньев, а в W {р) входит г таких звеньев. Тогда это выражение можно представить в виде: p-W-f ip) -c-r - IJp-rWip) Здесь, как и прежде, сделана подстановка: W ip) p-W (р); ТУ (р) = p-Wi, (р), причем W (0) = /с, а W] (0) = к. Из этого выражения следует, что хг = О, если г> Z, т. е. если в системе вне Wf (р) имеется хотя бы одно интегрирующее звено. В качестве примера на рис. 2-1, а показана астатическая система регулирования напряжения генератора, которая отличается от статической системы, изображенной на рис. В-2, в, наличием интегрирующего звена в регуляторе. Роль интегрирующего звена играет электрический двигатель постоянного тока БД. Изменение тока возбуждения генератора производится в этой системе путем изменения сопротивления реостата R. Это 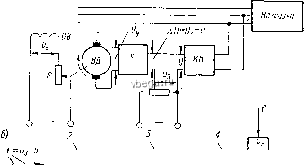
ТиР+1 Рлс. 2-1. Астатическая система регулирования напряжения синхронного генератора. осуществляется перемещением его движка двигателем БД. Этот двигатель в данной схеме служит интегрирующим звеном, поскольку угол поворота его вала является интегралом от скорости вращения, которая, в свою очередь, пропорциональна подаваемому на якорь двигателя напряжению. При всяком изменении напряжения генератора возникает сигнал AU = U3 - U, который, будучи усилен усилителем У, приводит во вращение двигатель БД. Это вызывает изменис тока возбуждения генератора, а следовательно, и его напряжения U. Двигатель остановится, и система вернется в состояние покоя только после того, как исчезнет сигнал AU, т. е. когда напряжение генератора вернется к своему первоначальному значению. На рис. 2-1, б изображена структурная схема рассмотренной системы регулирования, где двигатель БД представлен как реальное интегрирующее звено с передаточной функцией  В соответствии с изложенным выше в данной системе статическое отклонение и, доляно отсутствовать не только при изменении нагрузки /, но и при изменении других возмущений, приложенных к системе на участке от точки до выхода интегрирующего звена, т. е. до точки Ub, если идти против направления передачи сигнала. Таким образом, статическое отклонение регулируемой величины Up будет отсутствовать при изменении напряжения питания цепи возбуждения, параметров этой цепи, а также скорости вращения генератора (рис. 2-1, а)., Вместе с тем возмущения, действующие на все элементы регулятора - усилитель, измеритель напряжения и сам двигатель БД, - будут вызывать статическое отклонение Up, поскольку интегрирующее звено находится между эти1ш точками системы и регулируемой величиной Wp. Для устранения статического отклонения х от возможно большего числа возмущений, действующих на систему, желательно, вводя интегрирующее звено в управляющее устройство, помещать его вог.можно ближе ко входу последнего, т. е. дальше от х. В частности, например, если в рассмотренную систему регулирования напряжения (см. рис. В-2, в) включить вместо двигателя БД в качестве интегрирующего звена электронный интегратор на входе усилителя У\ будет исключено статическое отклонение регулируемого напряжения, вызванное возмущениями, действующими на этот усилитель и проявляющимися дрейфом его нуля. Заканчивая рассмотрение первого способа ликвидации статического отклонения путем применения астатического управляющего устройства, укажем, что практическое применение этого способа всегда связано с определенным усложнением системы. (Это видно и из сравнения статической системы регулирования напряжения, изображенной на рис. В-2, в, с астатической, показанной на рнс. 2-1, а.) Поэтому переход к астатической системе целесообразен только в случае, когда для получения заданной статической точности требуется достаточно большой коэффициент передачи статической системы, что тоже затруднительно. Подробнее об этом будет сказано в § 7-5. Компенсация возмущений. Рассмотрим теперь второй путь устранения статического отклонения выходной величины системы, который заключается в обраш,ении в нуль числителя выражения (2-6) для Жст, т. е. в получении W/.(0) = 0. Такой результат может быть получен применением управления по возмущению. Суть способа заключается в том, что на основе Измерения внешнего возмущения управляющее устройство осуществляет такое воздействие на объект управления, чтобы компенсировать естественное влияние данного возмущения на выходную величину объекта. Схема системы компенсации показана на рпс. 2-2, а. С учетом приведенных на этом рисунке обозначений коэффициентов передачи условие компенсации влияния /.р на имбет вид: ст = (/х + /ио) /ст = О, откуда коэффициент передачи управляющего устройства по возмущению / должен быть равен (2-9)  --0 Выражение (2-9) определяет коэффициент передачи управляющего устройства УУ в зависимости от параметров объекта управления О, при котором Жрг не зависит от /ст- На рис. 2-2, б изображена комбинированная система а в т о м а т и ч е с к о г .0 управления. В ней замкнутая САУ, которую мы рассматривали ранее, дополнена Of fx Wo(p) Рпс. 2-2. Система компенсащш статического отклонения на выходе объекта. разомкнутой системой компенсации влияния возмущения fr на х.,.. В этой системе Vfx (0) ст 1 W (0) /ст> (0) = Wf, (0) + PF/, (0) W, (0) = /с + kfK. При выполнении условия (2-9) W (0) = О и с точки зрения статики замкнутая система освобождается от влияния возмущения /. Разумеется, компенсация с равным успехом может быть применена к возмущениям, действующим не только на объект, но и на любое звено управляющего устройства. Компенсация не делает cncTeXiy астатической, так как другие, нескомпенсирован-ные возмущения по-прежнему создают статическое отклонение Жд-Однако она позволяет резко снизить суммарное статическое отклонение Xqj., вызванное всеми возмущениями и определяемое формулой (2-5) ст = -ПрГ~ - благодаря исключению из числителя этого выражения одного из слагаемых. При этом, так как компенсацию осуществляют, естественно, по наиболее сильно влияющему на xj основному возмущению, введение ее часто позволяет при неизменном коэффициенте передачи системы к снизить величину на целый порядок или наоборот: при неизменном значении ж.. снизить коэффициент передачи системы к и тем самым упростить ее. § 2-3. ДИНАМИЧЕСКИЕ СТАЦИОНАРНЫЕ РЕЖИМЫ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Как было сказано в § 2-1, стационарные (установившиеся) режимы в системах автоматического управления возникают в результате приложения к ним внешних воздействий, изменяющихся во времени по определенному установившемуся закону. Типовыми воздействиями такого вида являются гармоническое воздействие и воздействия, изменяющиеся с постоянной производной - скоростью или ускорением. Рассмотрим последовательно соответствующие стационарные режимы. А. Стационарный режим САУ при гармоническом воздействии Б этом режиме выходная величина системы ж приходит в вынужденное колебание с частотой, равной частоте внешнего воздействия. Амплитуда и фаза колебаний ж определяются известными нам частотными характеристиками замкнутой системы, т. е. в стационарном режиме, вызванном воздействием / =/макс sin (0, выходная величина системы = Жмакс sin (СО + Ф), где з: ,.е = ТУз(/(о)/,а,;р; ф = arg И (/со). Таким образом, гармонический стационарный режим САУ определяется ее частотными характеристиками, которые были рассмотрены в первой главе. Б. Стационарный динамический режим САУ прн воздействиях, изменяющихся с постоянной производной В этом случае практически имеются в виду воздействия, изменяющиеся с постоянной скоростью V, когда / vt, и с постоян-кы.\1 ускорением а, когда / = af/Z. Для общности рассмотрения будем считать, что воздействие изменяется с постоянной к-й производной /, = pf. Выходная величина систел1ы ж-имр)/---/--- - гУР1/ 1 (р) W и>) р
|