
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Классификация автоматического управления классификация автоматического управления Для ознакомления с основньмп видами систем автоматического управления и соответствующей терминологией рассмотрим . классификацию САУ по ряду признаков, существенных с точки зрения теории автоматического управления. А. Разомкнутые, замкнутые и комбинированные системы В схеме САУ, изображенной на рис. В-1, на управляющее устройство поступают три вида информации: информацияо величине X, определяющей состояние объекта, информация о .величине Хз, задающей цель управления, информация о F - возмущениях, нарушающих режим работы объекта. Однако возмшкны САУ, в которых используется лишь часть перечисленной инфор-Мо.ции. При этом в зависимости от видов используемой управляющим устройством информации различают два основных типа САУ - разомкнутые системы иЪамкнутые системы. ~ разомкнутых САУвыходная величина объекта X не измеряется,т. е. нет контроля за состоянием объекта. Разомкнутыми такие системы называются потому, что вследствие этого в них отсутствует обратная связь между выходом объекта и входом управляющего устройства, при наличии которой объект и управляющее устройство образуют замкнутый контур. Возможны разомкнутые САУ, в которых управляющее устройство измеряет только одно задающее воздействие Хз, одно возмущение F и, наконец, оба эти сигнала одновременно. JB первом варианте разомкнутой САУ управление осуществляется по задающему воздействию: поступающие извне команды Хз приводят путем изменения управляющего воздействия и к соответствующему изменению выходной величины объекта X. Точность обеспечиваемого при этом соответствия менаду X и Хз целиком определяется постоянством параметров системы и возмущений и никак не контролируется. Поэтому практически такие системы пригодны лишь при достаточно высокой стабильности указанных выше условий работысистемы и невысоких требованиях к точности. Примером системы этого типа служит разомкнутая система программного управления напряжением синхронного генератора, изображенная.на рис. В-2, а.Объектом управления здесь является синхронный генератор Г, вращаемый с постоянной скоростью-двигателем Д: Выходная величина объекта - напряжение генератора - определяется напряжением возбуждения, подаваемым на обмотку возбуждения генератора ОВ от устройства задания графика напряжения УЗГ. Последнее является управляющим устройством. Напряжение возбуждения автоматически изменяется во времени в соответствии с заложенной в УЗГ программой, обеспечивая соответствующее изменение напряжения генератора. В такой системе управления действительное напряжение мон<ет значительно отличаться от заданного, например, вследствие изменения величины нагрузки генератора, скорости вращения двигателя, температуры обмоток генератора. г Вторым вариантом разомкнутой САУ является система автоматического у и р а в л.е н и я по в о з м у щ е -н и ю, или, как ее еще называют, с и с т е м а автоматической компенсации. Такие системы нашли применение, d частности, когда задачи управления сводятся к поддержанию постоянства выходной величины X объекта. 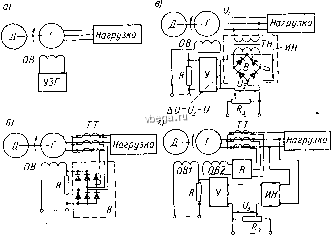 Рис. В-2. Системы управления напряжением синхронного генератора: а - разомкнутая система программного управления; б - разомкнутая система компенсации влияния нагрузки; в - замкнутая система управления по отклонению; г- комбинированная система управления по отклонению с коыиенсацпв!! влияния нагрузки. Иа рис. В-2, б в качестве примера такого типа системы показана система стабилизации напряжения синхронного генератора при переменной электрической нагрузке на его зажимах. Чувствительное устройство, состоящее из трех трансформаторов тока ТТ и выпрямителя В, выдает напряжение постоянного тока, про-иордиональное току генератора. Это напряжение подается в цепь возбуждения генератора, изменяя ток возбуждения. При увеличении,- например, нагрузки напряжение на зажимах генератора соответственно уменьшится за счет увеличившегося падения 1!апряжения на обмотке статора. Однако одновременно благодаря действиго сигнала по току нагрузки генератора, создаваемого чувствительным элементом, ток возбуждения генератора увеличится настолько, что в результате напряжение генератора возвратится к своему исходному зна ченшо. Таким образом происходит компенсация влияния изменения нагрузки на напряжение генератора и обеспечивается поддержание напряжения на постоянном уровне в условиях переменной нагрузки. (Система управления по задающему и воз-мущающемувоздействиям является наиболее полным видом разомкнутой САУ. В этом случае управление объектом осуществляется в функции двух величин Xg и F, т. е. здесь объединены оба предыдущих варианта разомкнутых систем. Примером такой системы может быть система программного управления напряжением генератора, объединяющая схемы, изображенные на рис. В-2, й и б. (В этом случае в схеме рис. В-2, б напряжение питания цепи возбуждения должно подаваться от устройства задания графика напряжения УЗГ, показанного на рис. В-2, а.) В-отличие от системы программного управления, изображенной на рис. В-2, а, в новой схеме устраняется основная ошибка по напрянчению, вызванная непостоянством нагрузки генератора. Принцип компенсации возмущения позволяет существенно повысить точность управления в разомкнутых САУ. Однако все же эта точность остается невысокой, во-первых, вследствие невозможности охватить компенсацией все возмущения, действующие на систему (в том числе и на управляющее устройство), и, во-вторых, из-за изменения во времени параметров объекта и управляющего устройства. Последнее в полной мере относится и к параметрам цепи компенсации. Неточность и изменение настройки цепи компенсации тоже вызывают изменение выходной величины объекта. В силу изложенного разомкнутые САУ нашли применение только при невысоких требованиях к точности управления. \В замкнутых САУ на вход управляющего устройства подаются задающее воздействие Xg и выходная величина объекта X. Исходя из величины Xg, управляющее устройство определяет соответствующее требуемое значение X и, имея информацию о текущем значении X, обеспечивает необходимое соответствие между X и Xg путем воздействия на объект. В такой САУ управляющее устройство стремится ликвидировать все отклонения X от его значения, определяемого заданием Xg, независимо от причин, вызвавших эти отк.понения, включая любые возмущения, внешние и внутренние помехи, а также изменения параметров системы. Как видно из рис. В-1, САУ такого типа представляют собой 3 а м к и у т ы п контур, образованшдй объектом и управляющим устройством. При этом управляющее устройство создает обратную связь вокруг объекта, связывая его выход со входоиг. Замкнутые САУ называются поэтому еще система м и с обратной связью или системами управле-н и я по отклонению. Эти системы могут обеспечить принципиально неограниченную точность управления и представляют собой основной тип САУ. Основным содержанием настоящей книги является изучение именно замкнутых САУ. Везде ниже, где говорится о системах автоматического управления без уточнения их типа, будет подразумеваться замкнутая система. На рис. В-2, в показана в качестве примера замкнутая система управления напряжением синхронного генератора. Управляющее устройство системы состоит из измерителя напряжения ИН, который включает в себя трансформатор напряжения ТН с выпрямителем В и является чувствительным устройством; устройства задания величины напряжения C/g в виде делителя напряжения R, питаемого стабилвдированным н.апряжением, и усилителя У, являющегося одновременно и исполнительным устройством, воздействующим на объект. Вычислительное устройство в схеме на рис. В-2, в сводится к простейшей схеме сравнения напряжений U и Ua на входе усилителя, определяющей разность ДС/ = С/з - и. Напряжение U постоянного тока на выходе измерителя напряжения ИН однозначно связано с напряжением генератора Uv Когда U = t/g, сигнал AU на входе усилителя У равен нулю и управляющее устройство не де11ствует на генератор, являющийся объектом управления. EcTiii но какой-либо причине, например вследствие изменения нагрузки генератора или скорости его вращения, напряжение генератора изменится, на входе усилителя появится напряненпе AU соответствующей величины и знака. В результате на выходе усилителя возникнет напряжение, которое изменит ток возбуждения генератора, что приведет к возврату напряжения генератора к исходному значению., Возможный вид процесса изменения напряжения генератора С/- вызванного скачком сопротивления нагрузки i? , показан на рис. В-3. Аналогично происходит процесс управления и при изменении задающего нa- пряжения и а- Возникшая при этом величина Д С/вызовет путем изменения тока возбуждения генератора соответствующее изменение его напряжения. Если в схеме па рис. В-2, в вместо делителя напрян:ения поставить устройство задания графика напряжения, получится замкнутая система программного управления напряжением генератора. у1{омбинированные САУ представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по внешнему воздеххст-вяю. Показанная на рис.В-1 схема является схемой такой комбинированной САУ. Добавление к замкнутой системе управления разомкнутой системы компенсации влияния на выходную величину объекта Рис. В-3. Переходный процесс изменения напряншнпя генератора в системе, иоказанноп на рис. В-2, в. к&кого-либо возмущения облегчает задачу залшнутой САУ и тем самым позволяет упростить ее и повысить точность управления. Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и внешней ситуации. Примером комбинированной системы может служить система автоматического управления напряжением синхронного генератора, изображенная на рис. В-2, г й представляюхцая собой объг единение схем рис. В-2, бив. Б. Системы автоматического регулирования - системы стабилизации, системы программного управленця и следящие системы Частным, но широко распространенным видом систем автоматического управления являются системы автоматического регулирования (САР). Системой автоматического регулирования называется САУ, задача которой заключается в поддержании выходной величины объекта X на заданном уровне Хз, т. е. поддержание равенства X = Хд. В зависимости от характера задающего воздействия САР делятся на три вида: системы стабилизации, системы программного управления и следящие системы. В системах стабилизации задающее воздействие постоянно, в системах программного управления оно изменяется по заранее заданному закону, в следящих системах оно тоже изменяется, но закон изл1енения заранее не известии. В последнем случае задающее воздействие поступает на систему извне и задачей системы является обеспечение сленения выходной величиной объекта за изменяющейся задающей величиной так, чтобы все время поддерживалось равенство X = Х3. Управляющее устройство в системах автоматического регулирования называется регулятором, а выходная величина - регулируемой в е л и ч и н о й. Примерами систем автоматического регулирования- слунлат системы, показанные на рис. В-2, б, в, г. Объектом регулирования здесь является синхронный генератор, регулируемой величиной - ого напряжение, а обведеннь!е пунктиром управляющие устройства - регуляторами. Другим примером системы автоматического регулирования может служить автопилот, ведущий самолет по заданному курсу. Однако, если автопилот дополнить вычислительным устройством, которое определяет необходимое направление двинления самолета исходя из задачи достижения определенной точки пространства за минимальный промежуток времени или при минимальном расходе горючего и т. п., такую систему автоматического управления уже нельзя назвать системох! регулирования. В. Одномерные и многомерные системы В зависимости от количества выходньгх координат объекта управления, образующих вектор выходной величины X, САУ делятся на одномерные и многомерные (двухмерные и т. д.). Рассмотренные выше системы автоматического регулирования напряжения синхронного генератора (см. рис. В-2) являются одномерными системами. Если наряду с напряжением регулировать частоту этого генератора путем воздействия на скорость вращающего его двигателя, получится двухмерная система автоматического регулирования. Многомерные САУ (и САР), в свою очередь, делятся на системы связанного и несвязанного управления (регулирования). Система несвязанного управления- имеет несколько управляющих устройств, каящое из которых осуществляет управление CBoeit выходной координатой объекта. При этом все эти устройства не имеют взаимных связей. (Последнее, однако, не исключает возможности влияния управляющих устройств друг на друга через объект управления или, например, общий источник питания.) В системе связанного управления отдельные управляющие устройства связаны друг с другом внешними связями. Входящая в состав многомерной системы управления (как свя-занно11, так и несвязанной) отдельная система управления называется автономной, если управляемая ею выходная координата объекта не зависит от значений остальных его координат, так Ч.ТО изменение последних не вызывает изменения этой координаты. Система автоматического регулирования напряжения и частоты синхронного генератора является несвязанной двухмерной системой, если между регуляторами напряжения и частоты нет внешних связей. Однако входящие в нее системы неавтономны, так как при изменении частоты происходит изменение напряжения генератора (вследствие изменения скорости его вращения) и наоборот (вследствие зависимости от напряжения величины нагрузки на валу двигателя). Эти системы иринциниально можно сделать автономными путем наложения перекрестных связей между обоими регуляторами. При этом получится система связанного регулирования напряжения и частоты генератора. Г. Системы линейные и нелинейные Линейной называется система, которая описывается линейными уравнениями. В противном случае система является нелинейной. Чтобы система была нелинейной, достаточно
|