
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Экранирование высокочастотных катушек тренировки и специализации. Это значительно сокращает круг лиц, которым доступно управление данной РЭА. Человек-оператор может выступать в роли приемника, ретранслятора, анализатора или преобразователя информации, быть контролером работы РЭА или простым исполнителем команд. Основные показатели его работы следующие: время полного цикла регулирования Т; точность А; надежность Р[3]. Время полного цикла регулирования от момента поступления сигнала до ответа на него действием равно: п k k /1=1 = 1 1 = \ I = I /= I где п - общее число звеньев РЭА; /j-время задержки сигнала в t-M звене; k - число приборов (стрелок, знаков), за которыми наблюдает человек-оператор; A<j-время оценки показаний ( -го прибора (стрелки, знака); pi - число однотипных приборов (стрелок, знаков) иличисло наблюдений или регулировок; Atj -- время перевода глаза с одного прибора на другой (полный цикл заканчивается в исходной точке); т. - число регуляторов РЭА; - время выполнения моторных действий по управлению t-м регулятором РЭА; I - число спонтанных отвлечений человека-оператора; t - время t-ro спонтанного (самопроизвольного) отвлечения оператора от работы. Время задержки сигнала в РЭА (рио. 6.2) на 2-3 порядка меньше, чем время задержки сигнала человеком-операхором (190-500 мс и более). Наименьшее время задержки сигнала при возбуждениях средней интенсивности имеет тактильный анализатор (90-220 мс), затем слуховой (120-180 мс) и зрительный (150-220 мс) анализаторы. Минимальная частота обращенияк приборам определяется видом функции сигнала. При этом должны-соблюдаться условия r = l/2f или r = ( + l)/2f, где F - наивысшая частота рассматриваемой функции сигнала; : k - порядок высшей производной. Следует учесть, что работа с индикаторами, показывающими высшую производную сигнала, понижает скорость и точность обработки и требует специальной тренировки оператора. Суммарная погрешность комплекса РЭА-человек-оператор определяется как +:а2. где Oj - погрешность i-ro звена РЭА; Д - суммарная погрешность t, человека-оператора. Величина Д, как правило, в несколько раз больше Soj и является определяющим фактором. Минимальной величине А соответствует некоторый оптимальный темп работы человека-оператора, который меняется в зависимости от условий работы, эмоционального состояния и многих других факторов. Целесообразно так конструировать РЭА, чтобы человек-оператор мог сам выбирать оптимальный темп работы. Человек - оператор Сравнение данных п. г с программой работы Интерпретация показаний индикаторов восприятие показаний индикаторрб 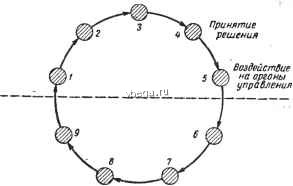 Отображение режима роботы аппаратуры на индикаторах Работа по ноВай праграмие Перемещение регулирующих элементов Реакция аппаратуры нап.е Рио. 6.2. Диаграмма прохождения сигнала по контуру управления. Темп подачи информации и вид погрешностей можно оценить с Помощью графиков рис. 6.3, 6.4. Низкий темп подачи сигналов (сравнимый с посторонними, мешающими сигналами) проявляется в падении активности человека-оператора, его засыпании . Высокий темп может служить не-только причиной резкого роста ошибок, но и приводить к отказу человека-оператора от выполнения задачи, так как он не будет успевать ее решать. Одновременное повышение точности и надежности работы достигается одновременной работой двух человек. В этом случае вероят-вость появления ошибки Р будет равна s = l 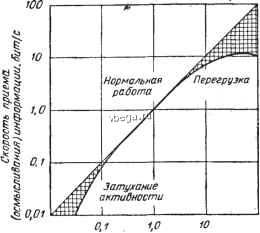 Скорость передали (входной) инрормаиии, бит/о Рис. 6.3. Темп подачи информации.
* 2 if 6 в Ю 12 11* Скорость бховной информации, би/тг/с Рис. 6.4. Характер погрешностей при перегру.чке оператора: / - пропуск сигнала; 2 -искажение; 5-задержка в передаче информации; 4-фильтрация потока информации с выбором определенных ( нужных ) сигналов; 4 -пропуск некоторых признаков сигналов. 4 Зак. 479 |