
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Экранирование высокочастотных катушек Коэффициент передачи удара без демпфирования: Wo \ со; Иуд = lA 2 (1 -cos fi)T ); ( т j . (20.31) При длительном импульсе амортизация не защищает РЭА от удара, а, наоборот, усиливает ударные нагрузки на блок максимум в два раза. При кратковременном импульсе ударные нагрузки, передаваемые на блок, тем меньше, чем меньше длительность импульса т по сравнению с периодом свободных колебаний Т ~ 2n/w блока. 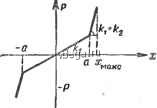 Рис. 20.8. Схема амортизации с упругими ограничениями в вертикальном направлении. Например, при То = я/бо) из формулы (20.31) следует, что Муд= = 0,52, т. е. амортизация будет в два раза уменьшать ударные ускорения на блоке при заданной длительности импульса Tq. Для уменьшения ударных ускорений с помощью амортизаторов необходимо выполнять условие [6] То < 0,25 Т. (20.32) Для предохранения аппаратуры от больших перемещений амортизация должна иметь упругие ограничители хода [8] с нелинейной характеристикой (рис. 20.8). Минимальное перемещение и ускорение бока будут: Лмакг.-- а to/-]/Г 2 Т 2-Д2 tOj2 2 (20.33) где (0 = ; {uj2 = fei/m; 2 = kjm; к - суммарные жесткости системы амортизации с ограничителями; а - максимальный прогиб амортизаторов до ограничителей; W - постоянное ускорение. пример 6. Рассчитать максимальное перемещение и максимальное ускорение блока, установленного на амортизаторах с упругими ограничителями хода, при ударной нагрузке. Дано: масса блока m = 20 кг; fej = 700 Н/см; = 6300 Н/см; а = 0,3 см; VI/ = 20 g; tj 0,01 с. По формуле (20.33) находим 0)2 = 35 ООО 1 /с; (Oj = 3500 1 /с макс=0,78 см; W=l&,7g\ (Худ = 0,935. Без ограничителей получили бы JfiMa c = 3,4 см; U7i6=12g; Цул=0,6. Амортизаторы с линейными характеристиками защищают аппаратуру от вибраций и кратковременных (tq 0,008 с) ударных ускорений, но при этом получаются большие прогибы, т. е. увеличиваются габариты амортизаторов [6]. Амортизаторы с нелинейной характеристикой при действии тех же нагрузок имеют меньшие габариты, но эффективность виброизоляции с помощью таких амортизаторов также понижается. Целесообразно выбирать амортизаторы из условия защиты от наиболее опасных вибрационных или ударных нагрузок. 20.4. РАСЧЕТ СИСТЕМЫ АМОРТИЗАЦИИ НА ДЕЙСТВИЕ ЛИНЕЙНЫХ УСКОРЕНИЙ Исходные параметры для расчета следующие: Q, W (i), t,k и Р(л:) -характеристика амортизатора. При расчете допускают, что ускорение W{f) изменяется по прямоугольному закону, длительность ускорения То, V7o = consl (рис. 20.8, о). Последовательно определяют величины л-мако. бмакс. лин- Расчет амортизации при линейной характеристике амортизаторов Максимальная деформация амортизаторов 2W;o , JtTo Bi2=ft/m; Г=2я/В1 Максимальное ускорение W=-(20.34) Wбмaкc=211oSШY- (20.35) Коэффициент передачи ускорения б макс . Of-., 1м1ш=-=sm у, . (20.36, При То< -из (20.36) получим [Хлин<1. т. е. амортизации защищает РЭА от линейных ускорений малой длительности. Т При То > -т 1 < ИлЕн < 2 и максимальная деформация согласно 6 формуле (21.34) будет 9 117. Хишо<~. (20.37) Например, при Wo = 20g и Cui2=4000 l/ci 2.20 000 Хшякс -= 10 см; 4000 №бмакс= >12а:макс = 40 000 см/с; [Хлин = 2. При длительных постоянных ускорениях амортизация не только не защищает аппаратуру, а даже усиливает действующие ускорения, так как максимальная деформация Лмакс достигает неконструктивных размеров. Для уменьшения деформации применяют упругие ограничители с нелинейной характеристикой. Расчет амортизации при нелинейной характеристике амортизаторов (рис. 20.8) Максимальная деформация амортизаторов мак.= -------(20.38) Максимальное ускорение определяется по формуле (20.33). Например, для данных примера 6, не налагая ограничений на длительность То, по формулам (20.34) и (20.33) находим лгцакс = = -0,85 см. We = 39 g, илин = 1.5. Амортизаторы с нелинейной характеристикой при действии длительных постоянных ускорений имеют меньшую деформацию (ограничивается ход), но при этом усиливаются ускорения, действующие на аппаратуру, которые резко возрастают в момент удара аппаратуры об ограничители. 20.5. ОСНОВНЫЕ ПАРАМЕТРЫ НЕКОТОРЫХ ТИПОВ АМОРТИЗАТОРОВ Амортизаторы пластинчатые типа АП и чашечные типа АЧ (рис. 20.9, 20.10 и табл. 20.2, 20.3). Конструкция и размеры амортизаторов нормализованы. Частота их собственных колебаний при номинальной нагрузке составляет 15-20 Гц в вертикальном направлении и 30-35 Гц в горизонтальном направлении. Виброизоляция аппаратуры в вертикальном направлении начинается с 25 Гц при амплитудах вибраций не более 1,2 мм. При больших амплитудах вибраций применять эти амортизаторы не рекомендуется. Применение упругих ограничителей значительно ухудшает амортизацию. |