
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Инверторы индукционного нагрева Таблица 4.5 входной выпрямитель выходной выпрмитеп управление Рис. 4.12. Базовая схема одноактного преобразователя. ИВЭП на основе ВЧП со средней точкой от 100 до 500 Вт (рис. 4.13) - Изменения входного напряжения +10%, -20% - К.П.Д. 7 - 80% - диапазон импульсного регулирования, Sn,ax 0,8 - максимальный рабочий ток уу, 1.4РВЫХ - максимальное рабочее напряжение выходной выходной I выфямитель 1 - -1 ВХОДНОЙ выпрямитель мощный инвертор схема управления Рис. 4.13. Базовая схема двухтактного ВЧ преобразователя. Vdsw - 2,0 X VBx(n,ax) - максимальное напряжение прибора > 1,7/dsw - рабочая частота от 20 до 200 кГц В табл. 4.5 - характеристики ИВЭП и рекомендуемые типы приборов. ИВЭП на основе полумостового ВЧП (100 - 500 Вт) (рис. 4.14) - изменения Vb,: +10%. -20% выходной выпрямитель I I входная входной выпрямитель мощный инвертор
- минимальное напряжение сток-исток: Vds > 1.2 Vdsw - рабочая частота от 20 до 200 кГц. Табл. 4.6 - характеристики ИВЭП и рекомендуемые типы приборов. ИВЭП на основе мостового ВЧП мощностью от 0,5 до 1 кВт (рис. 4.15). - изменения входного напряжения: +10%, -20% - К.П.Д. 17 - 80% - максимальный рабочий ток МДП транзистора: lyy, 1,4Рвых - максимальное рабочее напряжение МДП-транзистора Vdsw - VBx(n,ax) V2 - минимальное напряжение сток-исток Vds а 1,2Vdsw - рабочая частота от 20 до 200 кГц. В табл. 4.7 приведены характеристики ИВЭП и рекомендуемые типы приборов. 4.5. Электропривод двигателей схема управления Рис 4.14. Базовая cxeja полумостовогаВЧ преобразователя. - К.П.Д. t) - 80% -- выходная регулировка S - 0,8 -- максимальный рабочий ток МДП: Iw - иРвых - максимальное рабочее напряжение МДП: DSW - V, Bx(max) Мощные МДП-транзисторы вызывают определенный интерес в схемах управления двигателями. При зтом выявляется некоторая специфика. Это иллюстрируют три примера: управление шаговыми двигателями, высокоэффективные мосты Н-типа и однотранзисторные контролеры скоростью двигателей постоянного тока. Использование мощных МДП-транзисторов при управлении шаговыми двигателями Шаговые двигатели используются в основном в электромеханических системах. Область применения от принтеров, систем управления гибкими дисками, многочисленных контролирующих устройств до различ-: ных цифровых контролирующих систем. Задача контролеров шаговых двигателей состоит в управлении током I силовой обмотки двигателя по команде от внешнего устройства. Использование мощных МДП-транзисторов и КМОП-логических схем значительно упрощает задачи управления. Здесь описываются несколько Типов схем управления шаговыми двигателями, включая преобразователь управления с к.п.д. Ы 88%. ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ Шаговый двигатель на постоянных магнитах состоит из нескольких постоянных магнитов, расположенных радиально на валу ротора и электромагнитов. выходной фильтр выходной ] выпрямитель , ВХОДНОЙ выпрямт-ель мощный жвертор -il-9lt- J схема управления Puc. 4.75. Базовая схема мостового ВЧ преобразователя прикрепленных к статору (по окружности). Простейшая конструкция шагового двигателя показана на рис. 4.16. Полюс А Полюс в Полюс А Полюс В 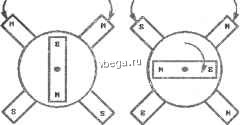 Рис. 4.16. Упрощешшя конструкция шагового двигателя Полюсы А и В электромагнитов, являясь северным полюсом, обеспечивают соответствующее положение южного полюса ротора. При изменении полярности полюса А ротор поворачивается на 90° от исходной позиции. Это будет полный шаг. Таблица 4.6 ИВЭП на основе полумостЛого ВВЧП
Если полюс А будет выключен вместо переполю-совки, то ротор повернется на 45°, т.е. напротив полюса В, это- будет полшага Шаговые д8И1а1елиОбладают очень малыми угловыми шагами благодаря большому числу полюсов. Полюс статооа может быть изменен посредством изменения направления протекания тока в обмотке или посредством применения противоположных половинок центральной обмотки. На рис. 4.17 показана блок-схема шагового двигателя вместе с управляющими переключателями, диода ми и резисторами, ограничивающими ток, а также с источником питания. Переключатели SW1-SW4 могут осуществлять изменение магнитной полярности. Диоды ограничивают выбросы напряжения из-за индуктивностей обмоток и защищают переключатели от пробоя при их выключении. На рис. 4.18 показаны положения переключателей для последовательного осуществления пошагового и полушаового управления. Таблица 4.7 ИВЭП на основе мостового ВЧП
Переключение в обратной последовательности будет изменять направление вращения двигателя. Шаговая скорость определяет высокое значение di/dt в обмотках двигателя. Т.к. dl/dt является функцией напряжения питания, то желательно высокое питающее напряжение. Средняя величина тока в обмотках ограничивается паспортным значением двигателя. Например, серийный электрический сельсин (SLO-aYN) модели MO93-FC07 имеет ток 3,5 А на обмотку при сопротивлении обмотки 1,23 Ом на обмотку и индуктивности 7,94 мГн на обмотку. Т.о., рекомендуемое напряжение питания порядка 24 вольт, токи ограничиваются сопротивлениями 6,5 Ом мощностью 100 Вт на одну обмотку. При этом постоянный ток будет порядка 3 А, а постоянная времени L/R порядка 1 мс. Повышение напряжения питания, а следовательно и ограничивающего резистора будет понижать L/B и увеличивать шаговую скорость. Из-за инерции .ротора шаговый двигатель может испытывать вибрации и колебания. Для уменьшения вибрации используют механические демпферы. ПОЛНОШАГОВОЕ УПРАВЛЕНИЕ за1Щ1тные диоды 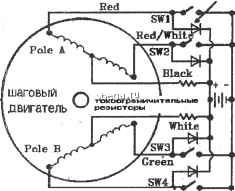 Green/White Рис. 4.17. Упрощенный шаговый двигатель с б.чоком управления Полношаговое управление
Р-разомкнут 3-замкнут Полушаговое управление Рис. 4.18. Положения переключателей. На рис. 4.19 показан полношаговый контроллер шагового двигателя, использующий один КМОП 4-х би- СгМп so о S1 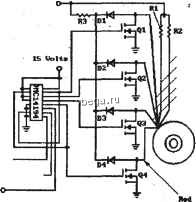 1 с) Crwtn l№i ь ипупьсы Спо ctipohty) СИГНАЛЫ УПРАВЛЕНИЯ
Logic Level* шгт St*nd*ra i,s и.спае ПСМ194 1 а Standard 16 Pin DIP ExaxiPle tlotar i n093-FC07 tlanufacrtured Bfi Superior Electric Z Diodtn Bl-M. 1N400Z 3 ИЗ. 10 Л10 и * 4 Н1.И2.6.5Л100и & Integrated Circuit , 11С14Ю1 ( CMOS ) ь ei 4. ттгмое or mpi2Noe Рис. 4.19. По.чнсяиаговый контроллер шагового двигателя. товый регистр сдвига для правления N-канальнын мощным МДП-транзистором. Последовательность сигналов управления соответствует рис. 4.18. Движение по часовой стрелке осуществляется при установке правого сдвига а контрольных сигналах SC, S1: при левом сдвиге - движение против часовой стрелки. Контрольные сигналы SO, SI, а также строб-сигнал управляют шаговым движением. При запуске необходимо SO, SI - 1,1 и строб сигнал. Требуемые контрольные сигналы приведены в таблице на рис. 4.19. Диоды 1-4 предотвращают индуктивные выбросы напряжения при выключении. На резисторе R3 создается обратное напряжение при прерывании тока при выключении. Величину R3 выбирают исходя из уровня всплеска напряжения сток-исток МДП-транзистора. Мощный МДП-транзистор очень быстро переключается, и задержка во времени включения диода вызывает всплеск напряжения сток-исток. Небольшая емкость (от 0,01 до 0,1 fiP), помещенная на обмотку двигателя, обычно снижает dv/dt и защищает сток-исток. Резисторы R1, R2 ограничивают токи в обмотках. ПОЛНОШАГОВОЕ И ПОЛУШАГОВОЕ УПРАВЛЕНИЕ Black 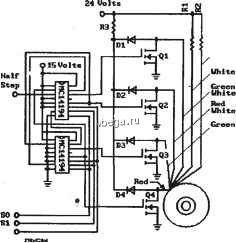 САВига (по ф{><ил-гу) СЭ<ЕМА УПРАВЛЕНИЯ
mRTS 1 Схавр1е Hot or ie Superior Electric* node I n093-FC07 2 Biodee D1-D4.1IM002 or E<uivalent 3 lia.lOillOU 4 ai.Bz.e.siiioou 5 Intagratad Circuite. I1C14194 (2 Required) 6 1-04. mniziwe or nmzNoe Puc 4.20. Данный контроллер показан на* рис. 4.20. Опреде ленный фазовый сдаиг, как и в предыдущем примере, создается контрольными сигналами, которые формиру ются двумя схемами МС 14194 -- 8-и битовый регистр сдвига. Для полношагового управления на линию пш шага (клемма Half Step ) необходимо установить сиг нал высокого уровня. Диоды ДНД4 и резистор R3 защищают МДП-транзисторы от перенапряжения, а R1 и R2 ограничивают ток в обмотках. Сдвиг влево и вправо формируется аналогично предыдущему примеру.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||