
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Инверторы индукционного нагрева УСЛОВИЯ t lJbR*150 V, Rl*26 л то к, С*0.01 fiP 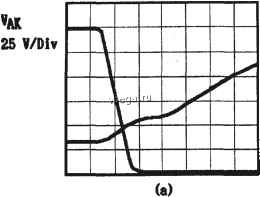 2.0 V/DW VCK 5.0 V/Div 20mA/0iv Яис 2.5i Диаграмма переключения MCRIOOO в цепи затвора. переключатели постоянного Статические тока Когда тиристор, МДП транзистор или биполярный транзистор применяются в цепях постоянного тока, необходимо предусмотреть средства для выключения прибора. Пример - применение МДП тиристора в схеме (рис. 2.54). В данном примере нагрузки непосредственно включены в анодные цепи тиристоров, а схема работает по принципу флип-флоп (токовый прерыватель). Предположим, что Q1 вначале находится в проводящем состоянии, при этом коммутирующая емкость заряжается через резисторы Rug и Rs от источника питания Vdr (минус на обкладке, подключенной к тиристору Q1). При включении Q2 емкость С мгновенно не может перезарядиться, поэтому моментально создается обратное смещение на аноде Q1 коммутирующее данный тиристор. Коммутирующая емкость перезаряжается через Ru по экспоненциальному закону (рис. 2.55). Для обеспечения стабильной коммутации время предоставляемое схемой на коммутацию должно быть больше времени tg для тиристора. В примере Ru - Rta - 50 Ом, С - 0,22 мкф и схемное время 6 мкс, что соответствует tg МДП тиристора. Максимальная частота управления определяется постоянной времени RC, т.к. емкость должна успевать полностью перезаряжаться. Последовательный резистор Rs ограничивает начальный бросок тока. Простая схема управления построена на КМОП элементах. Инверторы G1 и G2 образуют мультивибратор с частотой около 13 кГц, а резистор R1 изменяет коэффициент заполнения. Буферные инверторы G3 и G4 непосредственно управляют тиристорами Q1 и Q2 соответственно. Т О., используя в данной схеме МДП тиристоры, можно получить схему управления малой мощности, и быстрое включение. Статические переключатели переменного тока Примеры использования МДП тиристора в целях переменного тока показаны на рис. 2.56 ч рис. 2.59. В первой схеме тиристор включен в плечо выпрямительного моста, при этом один МДП тиристор можно использовать для управления обоими полуволнами входного сигнала. В другом применении нагрузка может быть подключена последовательно с тиристором, при этом на выходе образуется цепь постоянного тока. Примеры подключения нагрузки к цепи переменного сигнала и постоянному выходу моста показаны на pvtd. 2.56 (Voac и Vodc), а на рис. 2.57 и 2.58 представлены осциллограммы напряжений на нагрузке, где сигнал частотой 2 кГц прерывается сигналом в 200 Гц. Когда необходимо промодулировать сигнал на нагрузке индуктивного характера, можно применить схему с двумя тиристорами (рис. 2.59). Здесь каждый прибор управляется только в течении полуцикла. Время коммутации tg становиться ограничивающим фактором по Частоте. Когда необходима положительная составляющая IIC14001 47 к (2) 1N9U f>13 кИг 510 pF 10 к 44- 111914 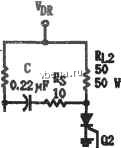 Ж1000-4 - 0.01 fr 10 k -VA- 1M914 Рис. 2.S4 Мощный триггер на полевых тиристорах. 2.0 A/DIV 10 V/DIV 10 (s/DIV Puc. 2.55 Выходные диаграммы мощного тиристора. Ш970А2 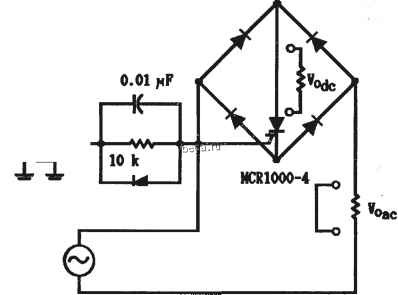 (Ч)11С14001 lugj 1Н Яис. 2. J6 Мощный ключ переменного тока на полевом тиристоре. 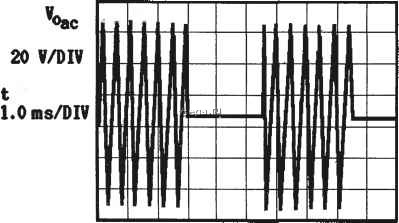 f =2.0 kHz fG 200 Hz Рис. 2.57 Выходные диаграммы ключа переменного тока.  Puc. 2J8 Дшарамма управления. 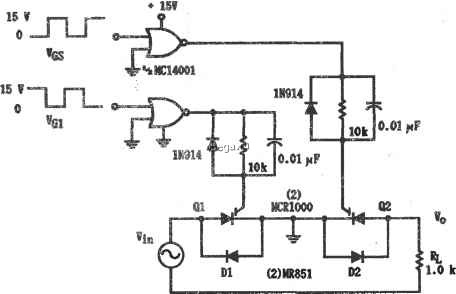 Рис. 2.59 Двунаправленный мощный ключ на полевом тиристоре. 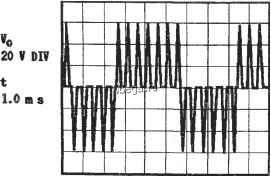 Рис 2.60а Сигнал управления ключа. переменного сигнала, включается Q1, в сигнал поступает в нагрузку через диод Д2. При отрицательной составляющей в рабочем состоянии Д1 и Q2. На рис. 2.60а показана осциллограмма напряжения на нагрузке, где входной сигнал частотой 2 кГц преобразован в 200 Гц сигнал на нагрузке. Все рассмотренные схемы работали от генератора переменного сигнала с максимальным выходныр напряжением 60 В и нагрузке составляла 1 кОм. Огра- ничивающим фактором являлся тип МДП тиристора -MCR1000 на максимальное напряжение в 100 В и действующее значение тока 15 А. Драйверы Драйверы для управления МДП тиристорами не ограничиваются только КМОП инверторами. Это могут бып любые полупроводниковые и даже механические переключатели, которые создавали бы необходимое воздейстт на затвор. В качестве примера приведена схема на рис. 2.606, использующая систему передачи управляющего воздейа вия по оптическому волокну, а также компаратор. МДП тиристор используется для вьщеления на нагрузке по уволн от источника переменного сигнала. Драйвер питается от источника напряжения 10 В, т необходимо для управления МДП тиристором. Однако, максимально допустимое напряжение оптического преобразователя (детектор - приемный усилитель) составлш Vcc 7,5 В. нная проблема решается подключением ш билитрона 4,7 В последовательно с обратной клемме* при этом эффективное значение Vcc становится равным 5,3 В. Диод МР5Ш включен в схему для блокирования отж цательных полуволн на нагрузке. В случае индуктивного характера нагрузки в схему необходимо включить цт снаббера для минимизации эффектов dv/dt. Для развязки от МДП пмктора в цепь затвор
|