
|
| |
|
Меню
Главная
Прикосновение космоса
Человек в космосе
Познаем вселенную
Космонавт
Из авиации в ракеты
Луноход
Первые полеты в космос
Баллистические ракеты
Тепло в космосе
Аэродром
Полёт человека
Ракеты
Кандидаты наса
Космическое будущее
Разработка двигателей
Сатурн-аполлон
Год вне земли
Старт
Подготовки космонавтов
Первые полеты в космос
Психология
Оборудование
Модель ракеты
|
Космонавтика Архитектура 3-х шинных систем
8.14. Использование микропроцессора 6800 в качестве управляющего устройства При использовании микропроцессора 6800 требуется иное, чем в случае микропроцессоров 8080, 8085 или Z80, распределение памяти. Такое распределение памяти приведено на рис. 8.13. Его особенность заключается в том, что при сбросе системы используются данные с адресами FFFE и FFFF. Поэтому для ПЗУ отводится верхняя часть адресного пространства. про- Рис. 8.13. Распределение памяти для системы, использующей микропроцессор 6800 в качестве контроллера. Адресация ввода-вывода построена по аналогии с обращением к памяти. Операция ввода-вывода выполняется при выборке адреса, находящегося в промежутке ЕООО и E3FF. Все коды выбора ввода-вывода можно оставить такими, какими они были приняты для системы 8085. Для устройства отображения резервируются адреса E0F0, E0F1, E0F2 вместо F0, F1, F2, принятых для системы 8080. На рис. 8.14 показана генерация сигналов выбора памяти. Здесь же приведен сигнал IO/M, также используемый для формирования шины управления. Схема шины управления представлена на рис. 8.15. Отметим, что генерирование используемого здесь сигнала IO/M показано на рис. 8.14. Кроме того, отметим, что уточнение некоторых сигналов линии управления осуществляется посредством тактового генератора фазы 2. Полная схема системы 6800 представлена на рис. 8.16, 8.17 и 8.18. 8.15. Выводы по техническим средствам В данной главе были описаны технические средства, необходимые для построения системы, управляемой микропроцессором. Рассматриваемая система предназначалась для программирования ППЗУ. Однако при обсуждении особенностей проектирования этой системы были рассмотрены стандартные приемы построения интерфейса, применимые к любым системам, управляемым микропроцессором. Был представлен и обсужден полный состав схем, необходимых для построения устройства программирования ППЗУ с
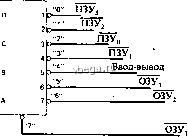 Рис. 8.14. Схема генерации кодов выбора устройства для системы 6800. Необходимо обратить внимание на генерацию сигнала разрешения ввода-вывода. b2(TTL). Рис. 8.15. Полная схема реализации сигналов шины управления системы 6800. гтройства 6800 Ю/М VMA У7404 ~J 7408 Состояние устройства
74LS20 74LS125 J ?Г\3 1> -BIOW - вюя . ВМШЯ 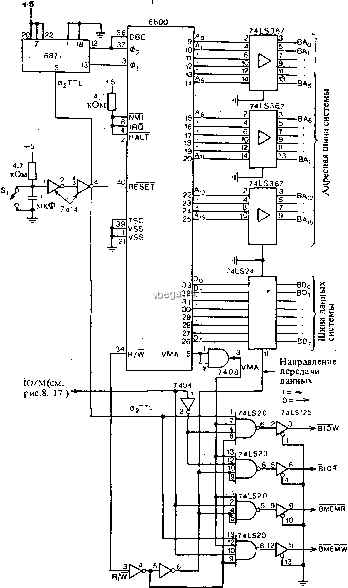 7404 ) со О) с - цжд оВ-оэ 1 со -ч ><ч:Ж>т:ооооо ппп ппппп q d ш сс Рис. 8.16. Полная схема использования микропроцессора 6800 в качестве контроллера системы автоматического программирования ППЗУ. JJ Ц- UJ )))))))) н пппппг I I I f I H.I I I I I 1,1 1,1 I 1.1 l.ti I I <t (П C4 - OO)C0l(dtn4-n OJOJOJfCJ - - - -T UUUl-IUULiuUUUI>4l> <<.v < < < < < о Q о о < < <n m m q С S о - < < m m о q q >.9: ])\))))] [ iimum < < < Ш < < < Ю Ю Ю Ш 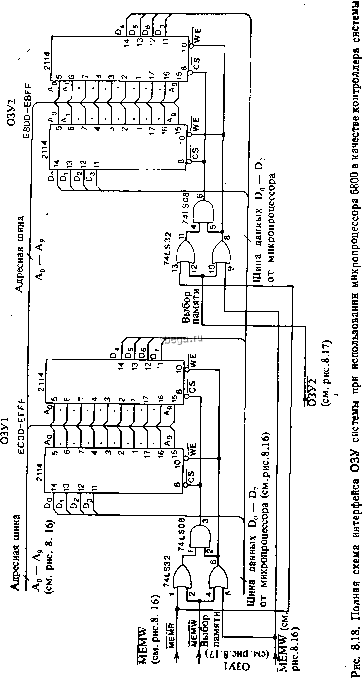 использованием микропроцессоров четырех различных типов. Если читатель уяснил особенности взаимодействия технических средств системы с микропроцессором, то задача проектирования любой другой системы, реализующей другие функции, представит лишь еще один вариант использования тех же приемов и методов. В гл. 9 будет рассмотрено программное обеспечение, предназначенное для управления техническими средствами, приведенными в данной главе. И в завершение в гл. 10 обсуждаются вопросы отладки системы в случае неправильного ее функционирования.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||